Lesson 1: Setting up a virtual machine
Hi everyone. Welcome to our first lesson here at Simply Embedded.
Before we start, I would like thank all of you who subscribed to the
mailing list. My goal is to create a community where we can learn, share
and explore the world of embedded systems so please invite your
friends, colleagues or classmates to join.
This lesson is really straight forward. I am assuming most of you have already used a virtual machine, or at least know what it is. If not don’t worry, I will go through the entire process of getting one up and running. We are going to be installing VirtualBox on your computer so that we can install a second operating system – Lubuntu – and create a unified development environment for everyone. This will simplify our lives later and save us from having to deal with incompatibilities in software packages. VirtualBox is available for Windows, Linux, OS X and Solaris, so I expect that should cover everyone here. The operating system on which you install VirtualBox is referred to as the “host” OS. The operating system we will install in the virtual machine is called the “guest” OS. You will see VirtualBox makes reference to these terms very often. After we install VirtualBox, we will create a new virtual machine and install Lubuntu. Finally, we will install some additional packages to make your virtual machine run at its best.
Step 1: Downloading and Installing VirtualBox
VirtualBox is available for download here. You should select the appropriate download for your host OS under platform packages. The current version at the time of this writing is 4.3.16 – I recommend that you use this version. Download and run the installer. Once you are done, run VirtualBox. You should see the following screen:
Step 2: Installing Lubuntu
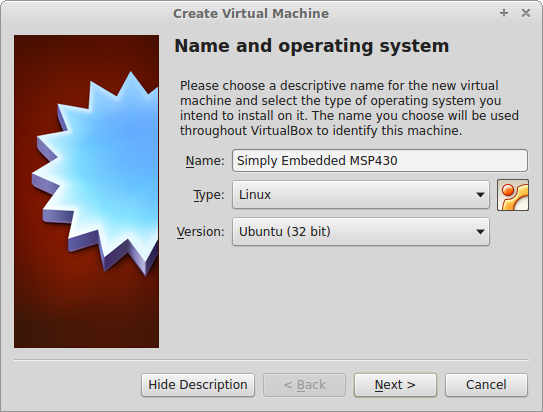
Lubuntu is a lightweight Linux distro based on Ubuntu. I like it because it is clean and simple, but also because it shares the same repositories as Ubuntu so the support is great. You can download Lubuntu here. The version we will use is 14.04.1. You should download the standard PC 32-bit version regardless what type of computer you are using (if you are using a Mac I believe this should still work but if you run across any problems please leave a comment). Once the download has finished, go back to VirtualBox and click on the “New” button in the toolbar. You can name the virtual machine “Simply Embedded MSP430” or anything really. For type you want to select Linux and for version you should select Ubuntu 32-bit.

On the next screen you will have the option to select the amount of memory allocated to your virtual machine. What you choose here will depend on how much physical memory (RAM) your computer has. Try to be as generous as possible but 1-2GB should be sufficient.
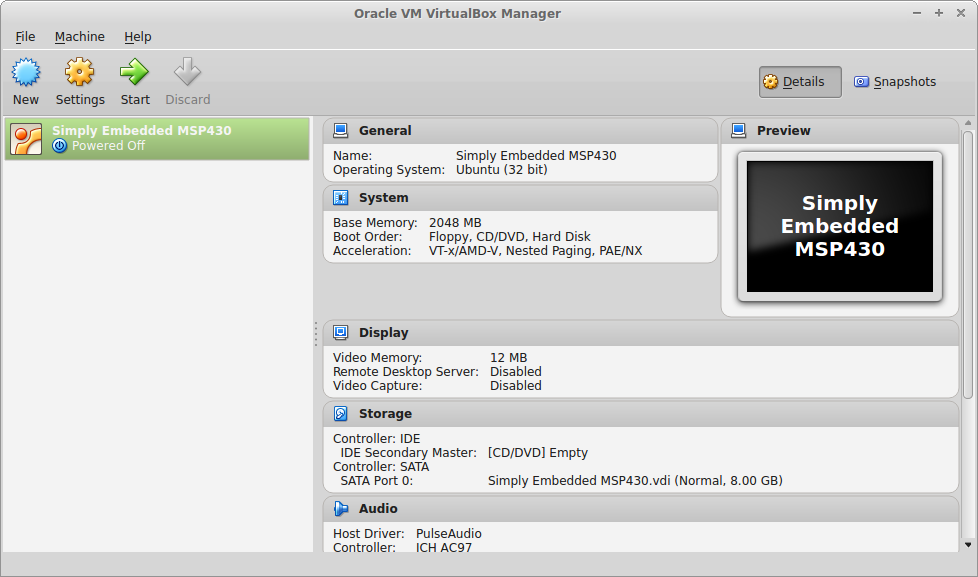
Next you will be asked to add a virtual HDD. Since you do not have one yet, select “Create a virtual hard drive now” click “Create” and then select “VDI” and click next. The “Storage on physical hard drive” screen lets you select how the virtual machine disk is allocated on your actual hard drive. There are advantages and disadvantages to both dynamically and fixed sized virtual disks. Dynamically allocated disks will start at a set size and will grow indefinitely as your system requires – or runs out of space. There is one pitfall: even when you clean up your virtual machine, the virtual machine disk will not shrink back down automatically. It doesn’t take much for a virtual machine disk image to expand to 20GB – 60GB or more (i’ve seen 500GB virtual machines…). On the the other hand, the fixed size option will just run out of space and stop working. So what do I recommend? Use the dynamic. If you need to shrink your drive in the future let me know, there are plenty of tutorials I can point you to that explain how to do it. Click next and on this final screen you can leave the default values. Click create and you should now see your new virtual machine available on the main screen.

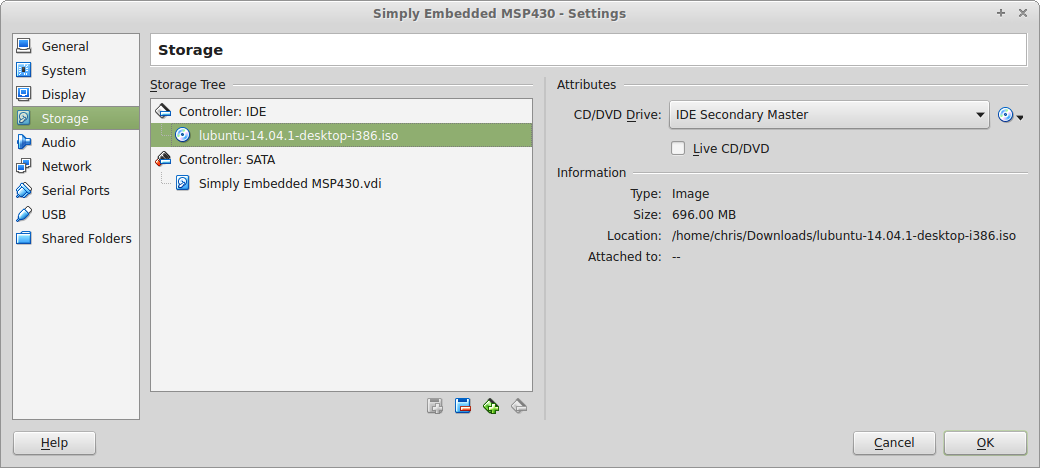
Select the newly created virtual machine, and click on the “Settings” button in the toolbar. Under the “Storage” section you should see “Controller: IDE.” It will currently be empty. Click on it and then on the right click on the CD icon and select “Choose a virtual CD/DVD disk file…” From the dialogue, choose the Lubuntu .iso file that you just downloaded.

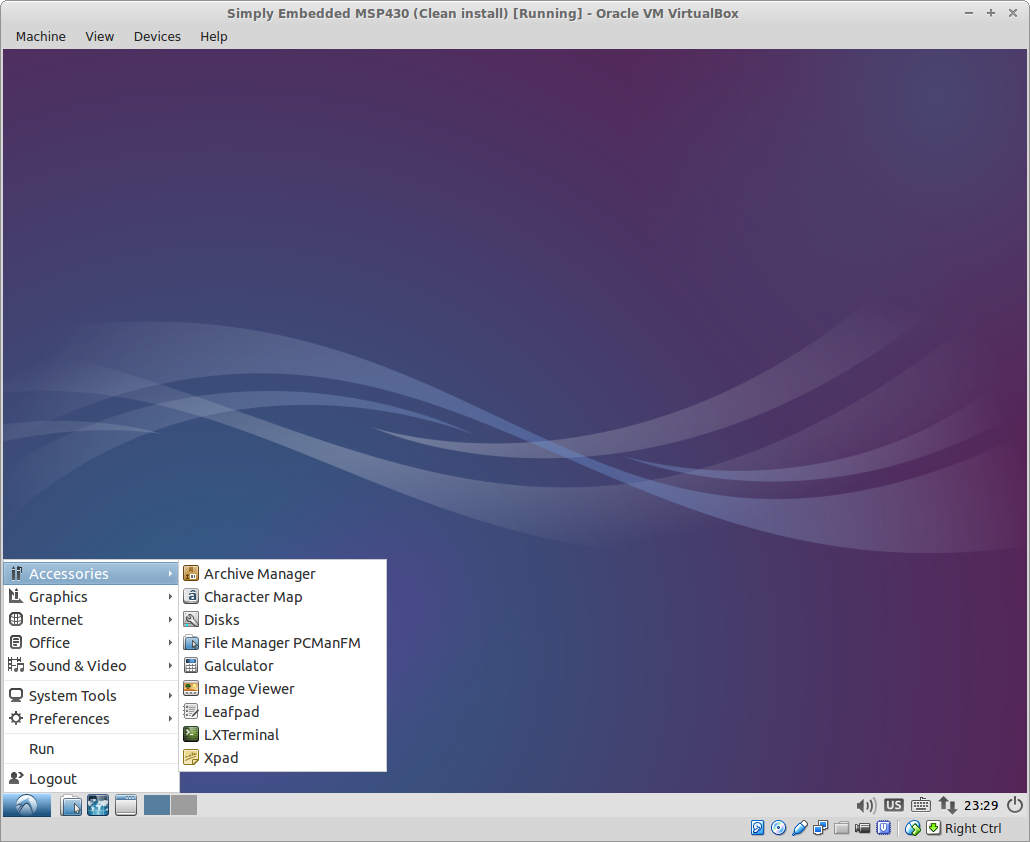
Now press ok to save your changes and start your virtual machine! It will boot up and ask you to select your language. You will then be taken to the Lubuntu live CD menu. Select “Install Lubuntu.” Follow the installation procedure leaving the installation type at its default value, fill out the appropriate fields and let the installation complete. When it is done, remove the installation disk by going to the “Devices” menu and under “CD/DVD Devices” select “Remove disk from virtual drive.” Then reset the virtual machine.
Step 3: Installing guest additions
Before you use your new Lubuntu guest, you should install the guest additions package. This will install drivers and other packages that will make your virtual machine experience much more seamless (like being able to scale the window, copy / paste across your host and guest OS, etc…). Before we install the guest additions, you will need to install some packages that do not come with Lubuntu, specifically:

From the terminal, enter the following command to install these two packages:
Snapshots are an extremely effective way of backing up the state of your virtual machine. If you accidentally mess up your Linux install, you can always restore a snapshot and your virtual machine will be exactly as it was. Important note though: all your files and settings will be restored to that point as well, so you still need to back up your work, personal files, bookmarks etc.. separately. Create a snapshot now by selecting “Take Snapshot…” from the “Machine” menu of VirtualBox.
In the next tutorial, we will be setting up the build environment for the MSP430.
This lesson is really straight forward. I am assuming most of you have already used a virtual machine, or at least know what it is. If not don’t worry, I will go through the entire process of getting one up and running. We are going to be installing VirtualBox on your computer so that we can install a second operating system – Lubuntu – and create a unified development environment for everyone. This will simplify our lives later and save us from having to deal with incompatibilities in software packages. VirtualBox is available for Windows, Linux, OS X and Solaris, so I expect that should cover everyone here. The operating system on which you install VirtualBox is referred to as the “host” OS. The operating system we will install in the virtual machine is called the “guest” OS. You will see VirtualBox makes reference to these terms very often. After we install VirtualBox, we will create a new virtual machine and install Lubuntu. Finally, we will install some additional packages to make your virtual machine run at its best.
Step 1: Downloading and Installing VirtualBox
VirtualBox is available for download here. You should select the appropriate download for your host OS under platform packages. The current version at the time of this writing is 4.3.16 – I recommend that you use this version. Download and run the installer. Once you are done, run VirtualBox. You should see the following screen:
Step 2: Installing Lubuntu
Lubuntu is a lightweight Linux distro based on Ubuntu. I like it because it is clean and simple, but also because it shares the same repositories as Ubuntu so the support is great. You can download Lubuntu here. The version we will use is 14.04.1. You should download the standard PC 32-bit version regardless what type of computer you are using (if you are using a Mac I believe this should still work but if you run across any problems please leave a comment). Once the download has finished, go back to VirtualBox and click on the “New” button in the toolbar. You can name the virtual machine “Simply Embedded MSP430” or anything really. For type you want to select Linux and for version you should select Ubuntu 32-bit.
On the next screen you will have the option to select the amount of memory allocated to your virtual machine. What you choose here will depend on how much physical memory (RAM) your computer has. Try to be as generous as possible but 1-2GB should be sufficient.
Next you will be asked to add a virtual HDD. Since you do not have one yet, select “Create a virtual hard drive now” click “Create” and then select “VDI” and click next. The “Storage on physical hard drive” screen lets you select how the virtual machine disk is allocated on your actual hard drive. There are advantages and disadvantages to both dynamically and fixed sized virtual disks. Dynamically allocated disks will start at a set size and will grow indefinitely as your system requires – or runs out of space. There is one pitfall: even when you clean up your virtual machine, the virtual machine disk will not shrink back down automatically. It doesn’t take much for a virtual machine disk image to expand to 20GB – 60GB or more (i’ve seen 500GB virtual machines…). On the the other hand, the fixed size option will just run out of space and stop working. So what do I recommend? Use the dynamic. If you need to shrink your drive in the future let me know, there are plenty of tutorials I can point you to that explain how to do it. Click next and on this final screen you can leave the default values. Click create and you should now see your new virtual machine available on the main screen.
Select the newly created virtual machine, and click on the “Settings” button in the toolbar. Under the “Storage” section you should see “Controller: IDE.” It will currently be empty. Click on it and then on the right click on the CD icon and select “Choose a virtual CD/DVD disk file…” From the dialogue, choose the Lubuntu .iso file that you just downloaded.
Now press ok to save your changes and start your virtual machine! It will boot up and ask you to select your language. You will then be taken to the Lubuntu live CD menu. Select “Install Lubuntu.” Follow the installation procedure leaving the installation type at its default value, fill out the appropriate fields and let the installation complete. When it is done, remove the installation disk by going to the “Devices” menu and under “CD/DVD Devices” select “Remove disk from virtual drive.” Then reset the virtual machine.
Step 3: Installing guest additions
Before you use your new Lubuntu guest, you should install the guest additions package. This will install drivers and other packages that will make your virtual machine experience much more seamless (like being able to scale the window, copy / paste across your host and guest OS, etc…). Before we install the guest additions, you will need to install some packages that do not come with Lubuntu, specifically:
- gcc
- make
From the terminal, enter the following command to install these two packages:
sudo apt-get install gcc makeYou will be prompted for your password and hit ‘y’ when prompted if you want to continue. This command will get all the packages from the Ubuntu repository, resolve any dependencies or conflicts and install them for you. Once the installation is complete, select “Insert Guest Additions CD Image…” from the “Devices” menu in VirtualBox. This will mount the guest additions disk image under /media/<user> where <user> is the username you entered during installation. Now navigate to the location of the guest additions image, for example:
cd /media/chris/VBOXADDITIONS_4.3.16_95972Then run the installer:
sudo ./VBoxLinuxAdditions.runThe reason we needed to install those additional packages earlier is because VirtualBox needs to compile and install the kernel modules that are required for the guest additions. Once the installation is completed, restart your virtual machine from the command line:
sudo shutdown -r nowStep 4: Snapshots
Snapshots are an extremely effective way of backing up the state of your virtual machine. If you accidentally mess up your Linux install, you can always restore a snapshot and your virtual machine will be exactly as it was. Important note though: all your files and settings will be restored to that point as well, so you still need to back up your work, personal files, bookmarks etc.. separately. Create a snapshot now by selecting “Take Snapshot…” from the “Machine” menu of VirtualBox.
In the next tutorial, we will be setting up the build environment for the MSP430.
Lesson 2: Setting up the toolchain
In this lesson we will be setting up the MSC430-GCC toolchain. The
version of the toolchain available at the time of this writing is
MSP430-GCC 5_00_00_00 which includes the first stable release of GCC
6.x. This new version is maintained by SOMNIUM Technologies, who has
actually provided a Linux installer. However, I will show you how to
compile it from source instead. I want to go through this exercise
because the compiler for your target may not always be available in a
pre-packaged binary or the version available may be older than required.
In the last lesson, we already installed gcc in our virtual machine. However the version of gcc that is available in the repositories is built for your host architecture, in our case x86. Compiling code for a target that is a different architecture than your host machine is called cross-compiling. We will build a gcc (using gcc) which runs on an x86 machine, but compiles machine code for the MSP430. So to start, fire up your virtual machine, open a browser and go to TI’s download site. At the bottom in the “Products Downloads” table, you should download these two files:
Building the toolchain
Building the toolchain takes long so you can download this build script which basically executes all the following commands without you having to sit around and wait for each one to complete. Make sure to first change the permissions so the script is executable and then run the script as root.
Navigate to the newly created directory msp430-gcc-6.2.1.16_source-full. There are several directories which are the individual components required to build the entire toolchain. Technically, gcc itself is only the compiler. The toolchain consists of many other packages which perform various tasks such as assembling, linking, built-in functions, debugging, etc… A standard C library (libc) is also typically included unless you are developing an operating system. In this case, newlib is the C library included but there are plenty others available such as glibc and uClibc. In each of these directories the following steps need be performed:
The source command runs the script and downloads those libraries alongside the compiler source. These libraries are mostly software implementations of arithmetic operations that the hardware does not support (i.e. division, floating point).
The ln command is for creating links, in this case passing the arguments –fns creates symbolic links. The symbolic links created are to the standard C library source in newlib. Using symbolic links makes them appear as if they are actually in the gcc directory, when they are in fact located up a level in the newlib directory. The standard C library is required because it is built with gcc and provides the standard C header files.
Next the build directories are created.
The build environment is based on automake/autoconf, so the configure script must be run first.
In the case of GNU toolchain the configure script accepts many arguments but only a few are required in most cases. The target and prefix argument are as described above in the environment variables section. The program-prefix simply adds a prefix to all the binary files, so for example gcc will become msp430-gcc. This is useful when you want to have one makefile that can build the same code for many architectures. For example, if I wanted compile main.c for both msp430 and arm, I could define my compiler as $(target)-gcc and then configure with target=msp430 to use msp430-gcc or configure with target=arm to use arm-gcc. The disable-nls flag tells the build to disable Native Language Support (NLS) which basically means GCC only outputs diagnostics in English. Finally, enable-languages tells the build system to compile only the specified programming languages – in this case C and C++. If you are interested in the many other options for gcc compilation you can read all about them here.
The next command, make, compiles the source code and the output is stored in the current build directory. If you need to completely clean your build directory or rebuild from scratch, the make distclean target is supposed to do this for you but in my experience it is often not effective. Its easier and safer to just delete the whole build directory and start again.
Did the compilation finish? If not take a coffee break…
Once it is done, the output files from the compilation need to be installed. The command sudo make install copies all the required files from the build directory to the directory specified by the environment variable PREFIX. It must be run as root because the /opt directory is read-only by default.
The same procedure has to be repeated for each of the other source directories. First for the gcc itself:
Adding the support files
The final step is to install the device support header and linker files. These are provided separately from the toolchain source in the second archive downloaded. The files need to be extracted but since it is a zip, it is a slightly different than before. Go back to the download directory run the unzip command.
And there you have it. Next lesson I will give you your first piece of code to compile, introduce you to the various utilities that come with the compiler and show you how to program and run the application on the MSP430 Launchpad.
In the last lesson, we already installed gcc in our virtual machine. However the version of gcc that is available in the repositories is built for your host architecture, in our case x86. Compiling code for a target that is a different architecture than your host machine is called cross-compiling. We will build a gcc (using gcc) which runs on an x86 machine, but compiles machine code for the MSP430. So to start, fire up your virtual machine, open a browser and go to TI’s download site. At the bottom in the “Products Downloads” table, you should download these two files:
- msp430-gcc-6.2.1.16_source-full.tar.bz2
- msp430-gcc-support-files-1.198.zip
Building the toolchain
Building the toolchain takes long so you can download this build script which basically executes all the following commands without you having to sit around and wait for each one to complete. Make sure to first change the permissions so the script is executable and then run the script as root.
chmod u+x msp430_gcc_build.sh sudo ./msp430_gcc_build.shWhile that runs, lets take a look at how we get the toolchain up and running. First, the following environment variables need to be set.
export PREFIX=/opt/msp430-toolchain export TARGET=msp430-none-elf export PATH=$PREFIX/bin:$PATHWe don’t want them to be system wide or persistent so they are set only in the context of our shell. To do so use the export command. The environment variables defined are:
- PREFIX – the directory where your cross-compiler will be installed – I typically install my toolchains under the “/opt” directory
- TARGET – the target architecture in the format <arch>-<target-os>-<abi/output> or something of that nature (its not really well defined). In our case the arch is msp430, target-os is none because it will be bare metal development, and output is elf format
- PATH – the system path, already defined but we must add location of the binaries we will build to it
sudo apt-get install texinfo expect libx11-dev g++ flex bison libncurses5-devBriefly this is what each of them is for:
- texinfo: utility to help create documentation in various formats
- expect: program which talks to other programs interactively, used in scripts
- libx11-dev: X11 windowing system development package
- g++: gnu C++ compiler (we only installed the C compiler last lesson)
- flex: fast lexical analyser generator
- bison: parser generator
- libncurses5-dev: screen handling and optimization package, basically a terminal upgrade
tar xvf msp430-gcc-6.2.1.16_source-full.tar.bz2This might take a while… If you are not familiar with the tar command, it is a very widely used archiving utility which supports multiple compression algorithms. The command line parameters we passed are as follows:
- x – extract
- v – verbose
- f – for file, always followed by the filename of the file you want to compress/extract
Navigate to the newly created directory msp430-gcc-6.2.1.16_source-full. There are several directories which are the individual components required to build the entire toolchain. Technically, gcc itself is only the compiler. The toolchain consists of many other packages which perform various tasks such as assembling, linking, built-in functions, debugging, etc… A standard C library (libc) is also typically included unless you are developing an operating system. In this case, newlib is the C library included but there are plenty others available such as glibc and uClibc. In each of these directories the following steps need be performed:
- configure: the build system generates the makefiles based on the host and target configuration (more on this later)
- compile: compile the component into the toolchain binaries using the generated makefiles
- install: install the binaries in their final location
pushd gcc source ./contrib/download_prerequisites ln -fns ../newlib/libgloss libgloss ln -fns ../newlib/newlib newlib popdThe first command pushd is another way to change directories, similar to cd but it pushes the current directory into a stack. You can later pop that directory off the stack using the popd command and return to the last directory.
The source command runs the script and downloads those libraries alongside the compiler source. These libraries are mostly software implementations of arithmetic operations that the hardware does not support (i.e. division, floating point).
The ln command is for creating links, in this case passing the arguments –fns creates symbolic links. The symbolic links created are to the standard C library source in newlib. Using symbolic links makes them appear as if they are actually in the gcc directory, when they are in fact located up a level in the newlib directory. The standard C library is required because it is built with gcc and provides the standard C header files.
Next the build directories are created.
mkdir build cd build mkdir binutils mkdir gcc mkdir gdbOne very important note about compiling the GNU toolchain is you don’t compile it in the source directory. If you try, you are very likely to get build errors. Instead, for each component, we create it own build directory: one for binutils, one for gcc (and newlib) and one for gdb.
The build environment is based on automake/autoconf, so the configure script must be run first.
pushd binutils ../../binutils/configure --target=$TARGET --prefix=$PREFIX --program-prefix=msp430- --enable-languages=c --disable-nls make sudo make install popdConfiguring the build can be fairly complicated to understand because there can be many required or optional parameters that that change the way the application is built. The parameters are application specific, so just because you know how to configure one application, doesn’t mean you know all the options for the next. Basically what happens when you run configure is the script analyses your system for various dependencies and from the information it collects, it is able to generate makefiles, configuration files and sometimes header files that will be compatible with your system. If you are not familiar with makefiles, don’t worry about it for now, there is a lesson dedicated to them. Sometimes dependencies cannot be resolved in which case the configuration (or build) will fail.
In the case of GNU toolchain the configure script accepts many arguments but only a few are required in most cases. The target and prefix argument are as described above in the environment variables section. The program-prefix simply adds a prefix to all the binary files, so for example gcc will become msp430-gcc. This is useful when you want to have one makefile that can build the same code for many architectures. For example, if I wanted compile main.c for both msp430 and arm, I could define my compiler as $(target)-gcc and then configure with target=msp430 to use msp430-gcc or configure with target=arm to use arm-gcc. The disable-nls flag tells the build to disable Native Language Support (NLS) which basically means GCC only outputs diagnostics in English. Finally, enable-languages tells the build system to compile only the specified programming languages – in this case C and C++. If you are interested in the many other options for gcc compilation you can read all about them here.
The next command, make, compiles the source code and the output is stored in the current build directory. If you need to completely clean your build directory or rebuild from scratch, the make distclean target is supposed to do this for you but in my experience it is often not effective. Its easier and safer to just delete the whole build directory and start again.
Did the compilation finish? If not take a coffee break…
Once it is done, the output files from the compilation need to be installed. The command sudo make install copies all the required files from the build directory to the directory specified by the environment variable PREFIX. It must be run as root because the /opt directory is read-only by default.
The same procedure has to be repeated for each of the other source directories. First for the gcc itself:
pushd gcc ../../gcc/configure --target=$TARGET --prefix=$PREFIX --program-prefix=msp430- --enable-languages=c --disable-nls make sudo make install popdAnd finally for gdb – the GNU debugger:
pushd gdb ../../gdb/configure --target=$TARGET --prefix=$PREFIX --program-prefix=msp430- --enable-languages=c --disable-nls make sudo make install popdNote that the same parameters are passed to the configuration script for each of these builds. This seems to work fine, however the README file provided suggests disabling certain features but does not indicate why.
Adding the support files
The final step is to install the device support header and linker files. These are provided separately from the toolchain source in the second archive downloaded. The files need to be extracted but since it is a zip, it is a slightly different than before. Go back to the download directory run the unzip command.
unzip msp430-gcc-support-files-1.198.zipUnzip will be extract the files to the a directory named msp430-gcc-support-files. It contains an include directory in which you will see all header files and linker scripts for each MSP430 device. The header files include all the device specific definitions and memory locations for registers and peripherals. The linker scripts tell the linker how to map various sections of code to physical memory locations on the device. Although they are all packaged together, the header and linker files belong in different locations in your installation. Use the following commands to copy the files to the appropriate location.
cd msp430-gcc-support-files/include chmod -R 644 * sudo cp *.ld $PREFIX/msp430-none-elf/lib/430/ sudo cp *.h $PREFIX/msp430-none-elf/includeThe second command is used to change the permissions of the files so they can be read by any user. This way the user compiling does not need to have root privileges. The location where the files are copied to is defined by the toolchain. If you put them somewhere else, you will have to explicitly point to them when compiling your code.
And there you have it. Next lesson I will give you your first piece of code to compile, introduce you to the various utilities that come with the compiler and show you how to program and run the application on the MSP430 Launchpad.
Lesson 3: The Blinking LED
In lesson 2 I forgot to mention one final step – creating a
snapshot. At the end of every lesson, I suggest you create a snapshot of
your virtual machine so that in case anything goes wrong, you can
restore it. The reason I bring this up is because it happened to me
while I was writing the last lesson. After I compiled gcc, my virtual
machine died. It would boot and then black screen on me, so instead of
fighting trying to fix it, I just restored my snapshot. I had to
recompile the toolchain, but it was less time wasted than recreating the
whole virtual machine had I not created that snapshot.
Step 1: Introducing the GNU toolchain
In the last lesson we went through the motions of compiling and installing the GNU toolchain. Now we will take a quick look at what is in there. Open up a console and go the ‘bin’ directory in the toolchain installation:
Step 2: Choosing an IDE
Before we jump into the code, we should spend a bit of time talking about editors. If you already have a preferred editor, you can probably skip to the next step. There are many options for editing code and I will point out a few of the most popular ones. I personally use vim – which is a command line based editor. I like it because it is fast and has all the features I need. I have customized my installed with additional programs, plugins and hot-keys so I can quickly navigate code. I will tell you now, vim is not for everyone. It takes some time to learn. If you are interested in using vim, I can provide you with my setup and configuration. Also, in the category of command line editors and a fierce competitor to vim is emacs. GUI front-ends exist for both vim and emacs.
For simple text editors, gedit is quite popular and is the default text editor on some Ubuntu distros. It has an easy to use tabbed interface and it is lightweight. There are also plugins available which can add most IDE functionality.
In the full-blown IDE category, the most popular is Eclipse. Eclipse is a Java based IDE which runs on Linux, Mac and Windows. It has all the features built right in and there are tons of additional plugins available. Because of the plugin support, Eclipse has become the go-to IDE for most semiconductor manufacturers to use as a foundation for their customized IDE environment. Texas Instruments’ Code Composer Studio and Freescale’s Code Warrior are prime examples. The downside to using an IDE like Eclipse is that it takes a lot of resources to run and in a virtual machine you may experience sluggishness. I would recommend increasing the amount of memory allocated to your virtual machine to at least 2GB. There are other popular IDEs such as Geany and Netbeans.
If you do not yet have an IDE of choice, I suggest you try out a few of these and see which one speaks to you.
Step 3: Setting up the MSP430 Launchpad
The MSP430 launchpad comes with two microcontrollers, one of which is the MSP430G2553 (Note: [Bob] has informed me that the rev 1.3 and older Launchpads do not come with this device, so you will have to purchase it separately from TI if you have an older board). This is the device we will be using for our tutorials. If the alternate device is already installed, you must carefully remove it by prying slowly on each side with a screwdriver. If you pull it up from only one side, you will bend or break the pins. When installing the MSP430G2553 in the socket, the notch must be facing up towards the top of the device. The pins may also not align exactly (they may be too wide for the socket). In this case, place the chip on the socket so that one row of pins is just lightly seated in the socket. Gently push in the pins on the other side using the screwdriver until they line up and then push the chip down completely into the socket. Don’t try and force the chip into the socket.


There are two very important documents which you should read through and will be required as reference. The first is the MSP430x2xx Family User Guide which describes all the features that the family supports. A family is a set of chips that share a similar set of registers, memory map and peripherals. Each device may vary by the number of pins available and therefore may have more instances of some peripherals. Sometimes devices in the same family may be pin compatible – assuming they are the same package. There will also likely be differences in the amount of memory available.
The second document is the MSP430G2x53/13 Datasheet. This document describes all the specifics of the device such as the exact sizes of memory, pin descriptions for the different packages and the electrical characteristics. Use the datasheet to find device specific information (such as which pin to use for I2c), and use family reference manual for functional descriptions. There is a lot of overlap between the two, so its best to cross-reference to have the best understanding of your device.
The memory map of the specific device is crucial to embedded programming. A memory map the really just the organization of multiple memory devices connected to a microcontroller. The memory devices may be internal or external. In the case of the MSP430, all the memory devices are internal. Each type of memory has its own properties, advantages and disadvantages. It may be volatile (loose power, loose the contents) or non-volatile (the contents are retained without power). There are also varying speeds which play an important role in choosing which memory to use in what application. These are some of the types of memory most commonly used for most microcontroller based embedded systems:

The next section of memory starting at 200h is the RAM (SRAM), specifically in the case of the MSP430G2553. The arrows on the left indicate that the top of RAM and bottom of flash can vary for each device. The top of flash is fixed at FFFFh, which includes the interrupt vector table. We will discuss interrupt vectors in another lesson; for now think of it as a table of functions stored in flash that the hardware can call to notify the software of an event. The very top of flash starting at 10000h is for some devices which have an extended addressing scheme called MSP430X which enables addresses greater than 16 bits. The MSP430G2553 is not one of these, so for us flash boundary ends at FFFFh.
If you take a look at the datasheet, table 8 shows the breakdown of the device specific memory organization. The MSP430G2553 has 16KB of flash and 512 bytes of RAM, so the RAM region ends at 3FFh and the flash starts at C000h. The information memory is a section of flash that is used to store device specific configuration parameters. We will use some of these in the next lesson to set up the clocking of the device.
Step 4: Getting the code
Git is the source code management tool (SCM) we will be using. It is one of the most popular in the open source community. I will be using git exclusively from the the command line. If you are not familiar with git I suggest you read through these two tutorials from git-scm and udemy. There are GUI front ends, but from my experience they do not do a great job. In my opinion, the command line is best and it is not difficult to learn. Git is not installed by default in Lubuntu, so let’s install it:
The first example using the definitions in this header file is the first line of code in the main function (back in main.c). The MSP430 has a watchdog timer, which is basically hardware clock that can reset the board if it is not ‘pet’ periodically. Petting the watchdog typically means writing some value into a register. We will talk about the watchdog, how to configure it, and how it is used in a later lesson. For now it will be held back – or disabled – so the device doesn’t constantly reset. To do so we use the watchdog control register, defined as WDTCTL in msp430g2553.h, and set the appropriate bits, WDTPW – the watchdog password – and WDTHOLD – the bit to hold the watchdog. Note that the register and bit names in the header file match those in the family reference manual.
In order to illuminate LED1 on the board, we need to know which pin it is connected to. Luckily, TI has provided that information directly on the board, so no schematic surfing required just yet.

The LED is connected to P1.0 where ‘P1’ means the pin is on port 1 of the device, and the ‘0’ defines which pin within the port. A port is a grouping of pins on the device. They are grouped to make accessing them manageable through register access. The next line of code uses the port direction register to set the pin direction to an output:

This applies to all the pin configuration registers for all ports. Therefore, the output of the pin can be set to either high or low using the P1OUT register by setting or clearing bit 0 respectively.
Step 5: Running the code
Finally let us compile and run the code! Start by using the following command to compile using gcc.
Next the file can be downloaded to the target. There are a few tools which can be used to download the code to the target. The first is gdb, which is the standard in the open source community for debugging. GDB can run standalone if you are debugging on your host machine. However, if you are debugging on a target, there needs to be an additional interface available. This is sometimes implemented as a utility called gdbserver, which creates a TCP/IP connection that gdb can connect to. Manufacturers of some JTAG (diagnostics interface) tools make their own gdbserver for their tools. GDB is extremely powerful and very mature, but can be a bit difficult to set up and learn. For this reason, I will start off with the second option, mspdebug. This utility is an open source project created specifically for programming and debugging the MSP430s. It is very simple to use and is available for download in the Ubuntu repositories, so let’s install this utility.

Mspdebug supports a number of drivers to accommodate various hardware interfaces. In the case of the MSP430 Launchpad, we must use the ‘rf2500’ driver. To start mspdebug with this driver, use the following command:

Each section of code has been written to the device flash (remember from above flash is from C000h to FFFFh). Now you can run the program by typing ‘run’ into mspdebug. The red LED on the board will start flashing. To stop the program use CTRL-C. To reset the board, use the ‘reset’ command.
And that’s all for today. Don’t forget to take a snapshot of your vm. In the next lesson we will build on this code to learn how to configure the clocks and pins of the MSP430.
Step 1: Introducing the GNU toolchain
In the last lesson we went through the motions of compiling and installing the GNU toolchain. Now we will take a quick look at what is in there. Open up a console and go the ‘bin’ directory in the toolchain installation:
cd /opt/msp430-toolchain/bin ls -lThese are the binaries provided by the installation. I will give a brief overview of the commonly used utilities and how they might be used, most of which is paraphrased from the man pages. If you want more information you can get all the details from there [note you must strip off the program prefix part i.e. ‘msp430-’, to view the man page]:
- addr2line: get the filename and line number for a given address in an object file. Used for debugging.
- ar: utility to create, modify or extract archives. Archives are typically used as code libraries. If you every see a file called libxxx.a, that is a library. It is a convenient way to store binary objects and link against them later. For example, say you were going to create a library for parsing serial input, you could compile it and archive it as libserial.a. Then when you want to use one of the functions from the library, link against it using -L <library directory> -lserial. A public header file is also required by the calling code, otherwise the library functions have to be extern’d.
- as: the assembler. Creates machine code (object files) from assembly. Called automatically by the compiler, but can be invoked manually on an assembly file.
- cpp: the C preprocessor. Invoked automatically by the compiler as the first step and is responsible for expanding all the macros, including all the header files, etc…
- gcc: the compiler. Takes C code as an input and compiles it into machine code with the help of the C preprocessor and assembler.
- gcov/gprof: these two utilities typically go hand in hand. They stand for GNU coverage and GNU profiling. Used for analyzing and optimizing code.
- gdb: the GNU debugger. Command line only (GUI front-ends available).
- ld: the linker creates an executable from one or more object files.
- nm: lists the symbols in an object file.
- objdump: a utility to inspect the binary content of object files. This tool can be used to view the disassembled output of the compiled code.
- objcopy: this tool is used to copy and translate files from one format to another. The object file itself cannot be programmed to the target because it contains additional information that the machine itself cannot interpret. This tool is often used to convert object files to binary so they can be programmed to flash.
- ranlib is the same as ar, except it generates an index which speeds up linking.
- readelf: Displays the contents of an ELF file. An ELF file is a type of object file commonly used by gcc and other compilers. The ELF file contains headers which define the code structure, separating the compiled object into sections which represent different types of code.
- size: lists the section sizes in an object file.
- strings: prints the printable characters in a file.
- strip: strips symbols from an object file. Specific flags can be used to retain some symbols.
Step 2: Choosing an IDE
Before we jump into the code, we should spend a bit of time talking about editors. If you already have a preferred editor, you can probably skip to the next step. There are many options for editing code and I will point out a few of the most popular ones. I personally use vim – which is a command line based editor. I like it because it is fast and has all the features I need. I have customized my installed with additional programs, plugins and hot-keys so I can quickly navigate code. I will tell you now, vim is not for everyone. It takes some time to learn. If you are interested in using vim, I can provide you with my setup and configuration. Also, in the category of command line editors and a fierce competitor to vim is emacs. GUI front-ends exist for both vim and emacs.
For simple text editors, gedit is quite popular and is the default text editor on some Ubuntu distros. It has an easy to use tabbed interface and it is lightweight. There are also plugins available which can add most IDE functionality.
In the full-blown IDE category, the most popular is Eclipse. Eclipse is a Java based IDE which runs on Linux, Mac and Windows. It has all the features built right in and there are tons of additional plugins available. Because of the plugin support, Eclipse has become the go-to IDE for most semiconductor manufacturers to use as a foundation for their customized IDE environment. Texas Instruments’ Code Composer Studio and Freescale’s Code Warrior are prime examples. The downside to using an IDE like Eclipse is that it takes a lot of resources to run and in a virtual machine you may experience sluggishness. I would recommend increasing the amount of memory allocated to your virtual machine to at least 2GB. There are other popular IDEs such as Geany and Netbeans.
If you do not yet have an IDE of choice, I suggest you try out a few of these and see which one speaks to you.
Step 3: Setting up the MSP430 Launchpad
The MSP430 launchpad comes with two microcontrollers, one of which is the MSP430G2553 (Note: [Bob] has informed me that the rev 1.3 and older Launchpads do not come with this device, so you will have to purchase it separately from TI if you have an older board). This is the device we will be using for our tutorials. If the alternate device is already installed, you must carefully remove it by prying slowly on each side with a screwdriver. If you pull it up from only one side, you will bend or break the pins. When installing the MSP430G2553 in the socket, the notch must be facing up towards the top of the device. The pins may also not align exactly (they may be too wide for the socket). In this case, place the chip on the socket so that one row of pins is just lightly seated in the socket. Gently push in the pins on the other side using the screwdriver until they line up and then push the chip down completely into the socket. Don’t try and force the chip into the socket.
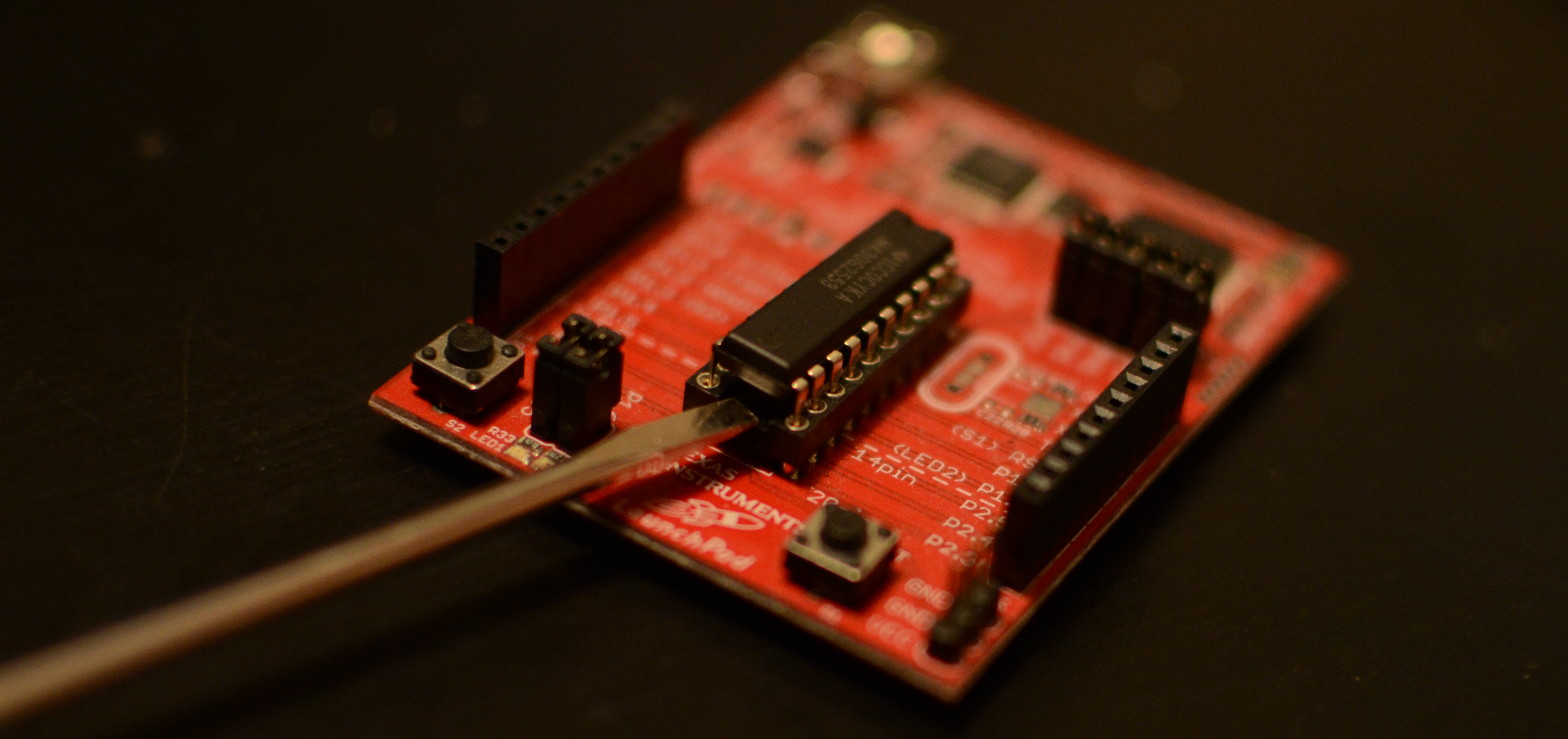
Removing the chip by prying at each side with a flat-head until it comes off
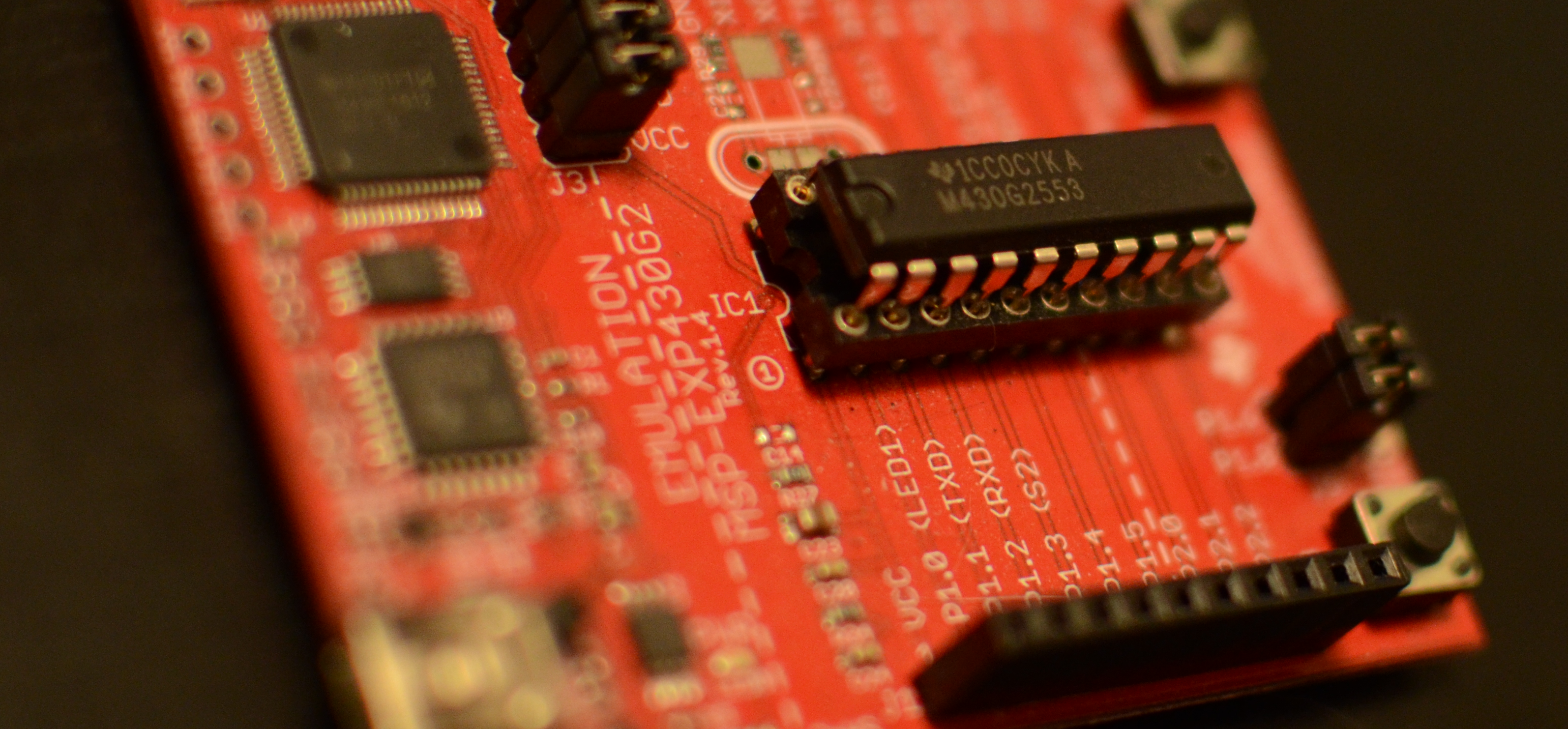
Installing the chip – notch pointing upwards and the chip seated lightly so the pins can be aligned
It is also important to keep electrostatic discharge (ESD / aka a
shock) in mind when you are handling your Launchpad. Damage caused by
ESD can leave you scratching your head because one second everything
works and the next some part of it may not. Make sure to discharge any
static electricity on something metal that is properly grounded before
you touch the launchpad. Alternatively, you can buy an antistatic mat or
wristband.There are two very important documents which you should read through and will be required as reference. The first is the MSP430x2xx Family User Guide which describes all the features that the family supports. A family is a set of chips that share a similar set of registers, memory map and peripherals. Each device may vary by the number of pins available and therefore may have more instances of some peripherals. Sometimes devices in the same family may be pin compatible – assuming they are the same package. There will also likely be differences in the amount of memory available.
The second document is the MSP430G2x53/13 Datasheet. This document describes all the specifics of the device such as the exact sizes of memory, pin descriptions for the different packages and the electrical characteristics. Use the datasheet to find device specific information (such as which pin to use for I2c), and use family reference manual for functional descriptions. There is a lot of overlap between the two, so its best to cross-reference to have the best understanding of your device.
The memory map of the specific device is crucial to embedded programming. A memory map the really just the organization of multiple memory devices connected to a microcontroller. The memory devices may be internal or external. In the case of the MSP430, all the memory devices are internal. Each type of memory has its own properties, advantages and disadvantages. It may be volatile (loose power, loose the contents) or non-volatile (the contents are retained without power). There are also varying speeds which play an important role in choosing which memory to use in what application. These are some of the types of memory most commonly used for most microcontroller based embedded systems:
- Registers: extremely fast memory, built into the microcontroller. Used for configuration and operation of the device and peripherals. Registers maintain the context of the running code, such as the program counter, stack pointer etc.. Registers are volatile memory.
- RAM/SRAM: very fast memory which can be internal or external to the device. There are many types of RAM used for different purposes but there is always some built into the device (typically SRAM). Any variable that needs to be modified during execution will be placed in RAM because it is fast to read and write. Sometimes code is run from RAM depending on the amount in the device and specific implementation.
- Flash: There are many types of flash, some internal, others external using a variety of interfaces. Internal flash is where the program is stored. In the case of the MSP430, the code is executed from flash as well. This is called execute-in-place and is a feature of some types of flash. This means the code can be run directly from flash rather than copying to RAM/SRAM first. Flash is non-volatile, so the memory contents will be retained across a power cycle. Obviously this is required for storing the program. You cannot write flash directly. A flash controller is required to program the flash (there is one built into the MSP430). Also, flash must be erased in blocks called sectors before it can be programmed. When it is erased, all the bits are set to ‘1’. You can clear a bit to ‘0’, but you can not set a bit to ‘1’ without erasing the sector.
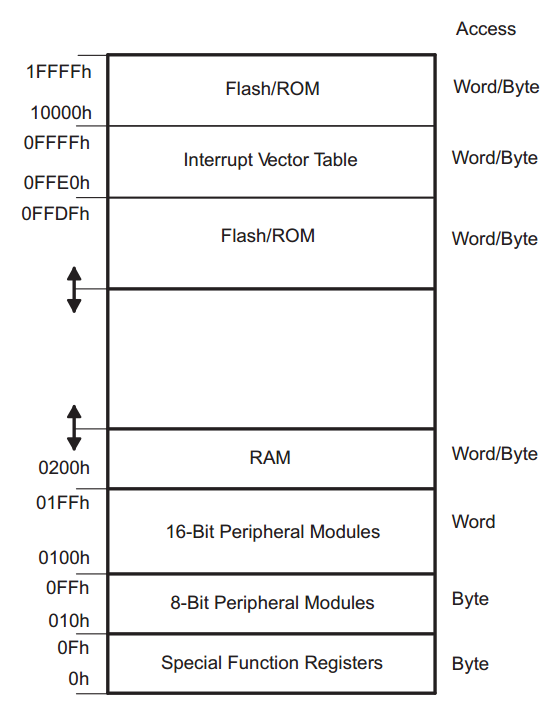
Illustration from MSP430x2xx Family User Guide, SLAU144
This illustration is the memory map defined for the family of
devices. Starting from address 0h to 1FFh, all the registers in the
device are mapped. There are three types of registers defined:- 8-bit special function registers (SFRs)
- 8-bit peripheral registers
- 16-bit peripheral registers.
The next section of memory starting at 200h is the RAM (SRAM), specifically in the case of the MSP430G2553. The arrows on the left indicate that the top of RAM and bottom of flash can vary for each device. The top of flash is fixed at FFFFh, which includes the interrupt vector table. We will discuss interrupt vectors in another lesson; for now think of it as a table of functions stored in flash that the hardware can call to notify the software of an event. The very top of flash starting at 10000h is for some devices which have an extended addressing scheme called MSP430X which enables addresses greater than 16 bits. The MSP430G2553 is not one of these, so for us flash boundary ends at FFFFh.
If you take a look at the datasheet, table 8 shows the breakdown of the device specific memory organization. The MSP430G2553 has 16KB of flash and 512 bytes of RAM, so the RAM region ends at 3FFh and the flash starts at C000h. The information memory is a section of flash that is used to store device specific configuration parameters. We will use some of these in the next lesson to set up the clocking of the device.
Step 4: Getting the code
Git is the source code management tool (SCM) we will be using. It is one of the most popular in the open source community. I will be using git exclusively from the the command line. If you are not familiar with git I suggest you read through these two tutorials from git-scm and udemy. There are GUI front ends, but from my experience they do not do a great job. In my opinion, the command line is best and it is not difficult to learn. Git is not installed by default in Lubuntu, so let’s install it:
sudo apt-get install gitOnce git is installed, you should set your username and email. This is used to track commits, so if you are working in a collaborative environment, you would be able to see who made what changes.
git config --global user.name “YOUR NAME” git config --global user.email “YOUR_NAME@DOMAIN.COM”Ok now we are ready to get the source code. The git repository is hosted on github. When you create a repository on github it is assigned a URL which can be used to obtain a copy of the repository using the git clone command.
cd git clone https://github.com/simplyembedded/msp430_launchpad.gitThe cloned repository will now be available in the directory called msp430_launchpad. Navigate into this directory. By default a cloned repository will be on the master branch. I will use tags to define lesson content. Tags are like a pointer to a commit on a branch. If you checkout a tag, you should create a new branch based off it before making modifications. Since this is lesson 3, I have created a tag called ‘lesson_3’. To view all the tags and create a branch off of this tag, use the following commands:
git tag git checkout -b lesson_3_devel lesson_3You will now be on your new branch called ‘lesson_3_devel’, which is based on the tag ‘lesson_3’. You can verify that you are on the correct branch by running
git statusYou should now see two files, README and main.c. Open up main.c in your editor of choice and navigate down past the file header comments. The first piece of code you will see is the include of msp430.h. This file is the generic header file for all the MSP430 devices. If you look at msp430.h, which is located in /opt/msp430-toolchain/msp430-none-elf/include, you can see that the file uses hash defines to determine which device specific header file to include. This is useful because it offers the flexibility of compiling the same code for a different device by changing only the compile flag (details are in the next step). The device specific header file defines all the registers, their offsets and bitfield definitions. To see what is available for this device, take a look at ./msp430-none-elf/include/msp430g2553.h. Throughout the tutorials I will be referencing this contents of this file as we use them in the code.
The first example using the definitions in this header file is the first line of code in the main function (back in main.c). The MSP430 has a watchdog timer, which is basically hardware clock that can reset the board if it is not ‘pet’ periodically. Petting the watchdog typically means writing some value into a register. We will talk about the watchdog, how to configure it, and how it is used in a later lesson. For now it will be held back – or disabled – so the device doesn’t constantly reset. To do so we use the watchdog control register, defined as WDTCTL in msp430g2553.h, and set the appropriate bits, WDTPW – the watchdog password – and WDTHOLD – the bit to hold the watchdog. Note that the register and bit names in the header file match those in the family reference manual.
In order to illuminate LED1 on the board, we need to know which pin it is connected to. Luckily, TI has provided that information directly on the board, so no schematic surfing required just yet.

The LED is connected to P1.0 where ‘P1’ means the pin is on port 1 of the device, and the ‘0’ defines which pin within the port. A port is a grouping of pins on the device. They are grouped to make accessing them manageable through register access. The next line of code uses the port direction register to set the pin direction to an output:
/* Set P1.0 direction to output */ P1DIR |= 0x01;If you are are unfamiliar with bitwise operations in C, you should stop now and learn them. This code sets bit 0 of the P1DIR register which configures pin P1.0 as an output. Why bit 0 you ask? Because the pin number within the port is directly correlated to the bit in the each of the pin configuration registers.
This applies to all the pin configuration registers for all ports. Therefore, the output of the pin can be set to either high or low using the P1OUT register by setting or clearing bit 0 respectively.
/* Set P1.0 output high */ P1OUT |= 0x01;This is by no means a complete explanation of the pin configuration for the MSP430. There is much more functionality which will be explained in depth in the next lesson. For now, this will be sufficient to turn on the LED. To make the LED blink we can toggle the pin output using the following code.
while (1) {
/* Wait for 200000 cycles */
__delay_cycles(200000);
/* Toggle P1.0 output */
P1OUT ^= 0x01;
}
This infinite while loop uses the __delay_cycles function to wait
200000 cycles between each LED toggle. This function is an intrinsic gcc
function, meaning that it is built in the compiler. To toggle the LED
output, the exclusive-or operator is used.Step 5: Running the code
Finally let us compile and run the code! Start by using the following command to compile using gcc.
/opt/msp430-toolchain/bin/msp430-gcc -mmcu=msp430g2553 main.cThe the ‘mmcu’ flag tells the compiler which microcontroller to compile for. When compiled with –mmcu=msp430g2553, the compiler will, amongst other things, define __MSP430G2553__ (i. e. #define __MSP430G2553__ in code) . Recall from the previous section, this define is used to determine which header file should be used. Once the code is compiled, there will be a new file called a.out. The name of the file ‘a.out’ is the default gcc output filename if one is not specified.
Next the file can be downloaded to the target. There are a few tools which can be used to download the code to the target. The first is gdb, which is the standard in the open source community for debugging. GDB can run standalone if you are debugging on your host machine. However, if you are debugging on a target, there needs to be an additional interface available. This is sometimes implemented as a utility called gdbserver, which creates a TCP/IP connection that gdb can connect to. Manufacturers of some JTAG (diagnostics interface) tools make their own gdbserver for their tools. GDB is extremely powerful and very mature, but can be a bit difficult to set up and learn. For this reason, I will start off with the second option, mspdebug. This utility is an open source project created specifically for programming and debugging the MSP430s. It is very simple to use and is available for download in the Ubuntu repositories, so let’s install this utility.
sudo apt-get install mspdebugNow, connect the USB cable to the MSP430 Launchpad and to your computer. Your host machine may or may not recognize the interface, but either way it should be available to attach to your virtual machine (NOTE: [Bob] has brought to my attention that if you are running a Linux host, you must add yourself to the vboxusers group in order to access USB devices in VirtualBox, instructions are available here).
Mspdebug supports a number of drivers to accommodate various hardware interfaces. In the case of the MSP430 Launchpad, we must use the ‘rf2500’ driver. To start mspdebug with this driver, use the following command:
mspdebug rf2500You should see the program connecting to the device. Once it is connected, program a.out to the device.
prog a.outThis what should happen:
Each section of code has been written to the device flash (remember from above flash is from C000h to FFFFh). Now you can run the program by typing ‘run’ into mspdebug. The red LED on the board will start flashing. To stop the program use CTRL-C. To reset the board, use the ‘reset’ command.
And that’s all for today. Don’t forget to take a snapshot of your vm. In the next lesson we will build on this code to learn how to configure the clocks and pins of the MSP430.
Lesson 4: Configuring the MSP430
The code for this lesson is available on github under the tag
‘lesson_4’. To get the latest code with git, the following commands can
be run from the project root directory. Checkout master first since this
is the branch that is tracking the origin and contains all the changes.
Start the Launchpad programmed with the code from lesson 3. How fast is the LED blinking? What if you wanted to make the LED blink twice a second, what delay would be required? That depends on the frequency of the CPU which is controlled by a clock source, or oscillator, in conjunction with the configurable clock module of the MSP430. There are many types oscillators which range in price and accuracy depending on the application. In general, a higher frequency bus will require a more accurate clock, but there are other factors which can affect accuracy such as temperature and electrical noise which must be taken into account by the hardware designer. Clock sources can be internal or external. External oscillators are usually more accurate, but they add to cost and space on the board. For the purposes of these tutorials, using the internal oscillator shall be sufficient. The MSP430 clock module can have up to four clock sources:
There are four registers to configure the MSP430 clock module:

Detailed definitions of these registers can be found in section 5.3 of the family reference manual. The source of the master clock is selected using BCSCTL2[SELMx]. In case you are not familiar with the latter notation, it is read as register[field in the register]. The default value after reset is 0b00, which configures the source to be DCOCLK, therefore no modification is required. Since the DCOCLK will be used as the source, the frequency must be configured. Three fields are required to do so, DCOCTL[DCOx], DCOCTL[MODx] and BCSCTL1[RSELx]. Selecting the values for DCOCTL[DCOx] and BCSCTL1[RSELx] can be done using figure 5-6 in the family reference manual. Choosing MODx is more involved and beyond the scope of this course as it requires knowledge of clock spreading and its effects on electromagnetic interference (EMI).
So what if an MCLK frquency of 1MHz clock is required? Using the values from the figure in the reference manual is not very accurate, and there is no easy way to determine what MODx should be. Luckily TI provides the data for us stored right on the chip. In the last lesson when we looked at the device specific memory organization (table 8 in the datasheet), there was a section in the flash called ‘Information Memory’. This section of the flash contains calibration data that TI has measured and provides to the user for accurate configuration of the device. The data there is stored in what TI calls TLV (Tag-Length-Value) format, which is a table of data at specific offsets defined by tags in the datasheet and reference manual. The TLV data is protected from modification using a software protection mechanism, but the integrity of the data should still be verified before using it. The first 2 bytes of the TLV area (address 0x10c0) contain the checksum of the next 62 bytes which contains the data. The checksum is verified by XOR’ing the data as 16-bit words and then adding the checksum. If the result is zero, the data is valid, any other value means the data is corrupted. Please note, there are many methods of calculating checksums, so this algorithm may not always be applicable. Below is a function which demonstrates how to verify the integrity of information section.
Now that the calibration data can be validated, let’s take a look at how it can be used to configure the device. The calibration data includes values for 1MHz, 8MHz, 12MHz, and 16MHz based on a 25 degree Celsius ambient temperature. The tags for each frequency setting are stored as two bytes, one contains the value for register DCOCTL and the other for BCSCTL1. Only the fields mentioned above required to configure DCOCLK are set. All other fields in the registers are cleared (except for BCSCTL1[X2OFF] if applicable to the device). To access this calibration data and set the DCOCLK to 1MHz, the following code can be used.
Part 2: Setting the LED blinking frequency
Now that the CPU frequency is known, the frequency of the blinking LED can be accurately configured. To blink the LED at a specific frequency, the number of CPU cycles to wait between toggling the LED must be calculated. Since the frequency of the CPU is 1MHz, 1 million cycles are executed per second.
If the desired blinking frequency is 2Hz (2 toggles per second), the LED should be toggled every 500000 cycles. [Update]
As Jerry pointed out in the comments below, my original definition of
the frequency was incorrect. A frequency of 1Hz means that the LED
should toggle on and off once, since this is the periodic signal.
Therefore to correct the sentence above, a frequency of 2Hz would
require the LED to be toggled 4 times a second, or every 250000 cycles.
The rest of the lesson has been updated to reflect this change. The
following formula can be used to calculate the delay:

This calculation can be implemented as a hash define in the code so that it will be calculated automatically. Using the formula above along with the __delay_cycle function, the code from the last lesson can be modified to set the blinking frequency to 2Hz.
Last lesson we briefly touched on the topic of pin configuration. Pin P1.0 could be configured as a digital input or a digital output using the P1DIR register. This is only part of the story. Most pins can actually be configured to perform several different functions. This is called pin multiplexing. Almost every microcontroller supports pin multiplexing on pins which do not have a dedicated function. Each pin is different and will have the ability to be configured for a defined set of peripherals on the chip. Often, as is the case with the MSP430, the default configuration of a pin is a digital input. To configure a pin to use one of its alternate functions, the PxSEL1 and PxSEL2 registers are used. These registers follow the same bit to pin mapping as described in lesson 3. When the bit for a given pin is cleared in both of these registers, as they are on reset, the pin is configured as a digital I/O (also called a general purpose input/output, or GPIO). Setting the appropriate bit in either or both of these registers will enable the pin’s alternate functions. The list of alternate functions for each pin can be found in device datasheet starting from table 16. It is important to note that even if a peripheral function is selected for a specific pin, the other port configuration registers (such as PxDIR) may still have to be appropriately configured. When we begin to use the peripheral devices, this concept will become clear.
The GPIOs on the MSP430 also have the option to be connected to internal pull-up or pull-down resistors through the PxREN registers. When the PxREN bit for a specific pin is set, the P1OUT register controls which resistor (pull-up or pull-down) the pin will be connected to. A pin connected to pull-up/pull-down resistors can be still be driven to the any level by an external device. For example, I2C uses pull-up resistors so that the idle state of the line is high. The master drives the line low to begin communication. Internal pull-ups and pull-downs are rarely used in practice as the value is fixed by the implementation of the microcontroller. Most digital designers prefer to have control over the specific value and also the ability to change it if required. The PxREN registers apply even if the pin is configured as an input.
Now lets go through an example to help solidify your understanding of pin configuration. The objective is to modify the code such that the LED will start blinking only once switch 2 (SW2) on the launchpad has been pressed. Switch 2 is connected to pin P1.3. From the datasheet, we can see all the possible functions of this pin.
 From the MSP430G2553 Datasheet (SLAS735)
Pin P1.3 can be either a GPIO, an ADC clock
output, a comparator output or a capacitive sensing input using the
P1SEL/2 registers. It can also be configured as an ADC voltage reference
or input as well as a comparator input by setting some additional
registers, but lets leave these aside for now. The goal is to read a
push button, so GPIO functionality is required, therefore P1SEL[3] and
P1SEL2[3] should be cleared. Next, P1DIR[3] should be cleared to set the
direction as an input. On rev 1.5 Launchpads, TI has removed the
external pull-up resistor for the button so we must use the internal
one. If your Launchpad is older this will still work. Set P1REN[3] and
P1OUT[3] to enable the internal pull-up resistor. Finally, the register
P1IN is read to obtain the value of the switch. In the example code
below, each of these registers will be explicitly set even if the
default value is correct. This is done for code clarity and robustness.
From the MSP430G2553 Datasheet (SLAS735)
Pin P1.3 can be either a GPIO, an ADC clock
output, a comparator output or a capacitive sensing input using the
P1SEL/2 registers. It can also be configured as an ADC voltage reference
or input as well as a comparator input by setting some additional
registers, but lets leave these aside for now. The goal is to read a
push button, so GPIO functionality is required, therefore P1SEL[3] and
P1SEL2[3] should be cleared. Next, P1DIR[3] should be cleared to set the
direction as an input. On rev 1.5 Launchpads, TI has removed the
external pull-up resistor for the button so we must use the internal
one. If your Launchpad is older this will still work. Set P1REN[3] and
P1OUT[3] to enable the internal pull-up resistor. Finally, the register
P1IN is read to obtain the value of the switch. In the example code
below, each of these registers will be explicitly set even if the
default value is correct. This is done for code clarity and robustness.
git checkout master git pull git checkout -b lesson_4_devel lesson_4Part 1: Configuring the clock module
Start the Launchpad programmed with the code from lesson 3. How fast is the LED blinking? What if you wanted to make the LED blink twice a second, what delay would be required? That depends on the frequency of the CPU which is controlled by a clock source, or oscillator, in conjunction with the configurable clock module of the MSP430. There are many types oscillators which range in price and accuracy depending on the application. In general, a higher frequency bus will require a more accurate clock, but there are other factors which can affect accuracy such as temperature and electrical noise which must be taken into account by the hardware designer. Clock sources can be internal or external. External oscillators are usually more accurate, but they add to cost and space on the board. For the purposes of these tutorials, using the internal oscillator shall be sufficient. The MSP430 clock module can have up to four clock sources:
- DCOCLK: Internal digitally controller oscillator
- VLOCLK: Internal very low frequency oscillator (~12kHz)
- LFXT1CLK: Low or high frequency oscillator can be used with an external low frequency crystal (i.e. 32768Hz for a clock) or at high frequency requiring an external crystal, resonator or clock source in the range of 400kHz – 16MHz
- XT2CLK: High frequency oscillator which requires an external crystal, resonator or clock source in the range of 400kHz – 16MHz
- MCLK: The master clock used by the CPU
- SMCLK: The sub-main clock, used for peripherals
- ACLK: The auxiliary clock, also used for peripherals
There are four registers to configure the MSP430 clock module:
- DCOCTL: DCO control
- BCSCTL1: Basic clock system control 1
- BCSCTL2: Basic clock system control 2
- BCSCTL3: Basic clock system control 3

Detailed definitions of these registers can be found in section 5.3 of the family reference manual. The source of the master clock is selected using BCSCTL2[SELMx]. In case you are not familiar with the latter notation, it is read as register[field in the register]. The default value after reset is 0b00, which configures the source to be DCOCLK, therefore no modification is required. Since the DCOCLK will be used as the source, the frequency must be configured. Three fields are required to do so, DCOCTL[DCOx], DCOCTL[MODx] and BCSCTL1[RSELx]. Selecting the values for DCOCTL[DCOx] and BCSCTL1[RSELx] can be done using figure 5-6 in the family reference manual. Choosing MODx is more involved and beyond the scope of this course as it requires knowledge of clock spreading and its effects on electromagnetic interference (EMI).
So what if an MCLK frquency of 1MHz clock is required? Using the values from the figure in the reference manual is not very accurate, and there is no easy way to determine what MODx should be. Luckily TI provides the data for us stored right on the chip. In the last lesson when we looked at the device specific memory organization (table 8 in the datasheet), there was a section in the flash called ‘Information Memory’. This section of the flash contains calibration data that TI has measured and provides to the user for accurate configuration of the device. The data there is stored in what TI calls TLV (Tag-Length-Value) format, which is a table of data at specific offsets defined by tags in the datasheet and reference manual. The TLV data is protected from modification using a software protection mechanism, but the integrity of the data should still be verified before using it. The first 2 bytes of the TLV area (address 0x10c0) contain the checksum of the next 62 bytes which contains the data. The checksum is verified by XOR’ing the data as 16-bit words and then adding the checksum. If the result is zero, the data is valid, any other value means the data is corrupted. Please note, there are many methods of calculating checksums, so this algorithm may not always be applicable. Below is a function which demonstrates how to verify the integrity of information section.
static int _verify_cal_data(void)
{
size_t len = 62 / 2;
uint16_t *data = (uint16_t *) 0x10c2;
uint16_t crc = 0;
while (len-- > 0) {
crc ^= *(data++);
}
return (TLV_CHECKSUM + crc);
}
There are a few stylistic and code safety notes that are worth
mentioning. First of all, the function is declared static and therefore
the function name is preceded with an underscore. This is a personal
preference and you don’t have to follow it, but it makes it easy to know
which functions are only accessible within the file. Next is the use of
types size_t and uint16_t. To access these types you must include
“stddef.h” and “stdint.h” respectively. I almost always use size_t as an
index in loops since it is the type returned by the sizeof operator
(sizeof() an array for example). The use of uint16_t is more important
however. When the specific length of data is known, it is always safest
and considered best practice to use the POSIX types (or equivalent)
which clearly indicate the size of the variable. In this case, using
‘unsigned int’ would be the equivalent, but what if the same code was
compiled on a PC. That variable would now be 32 bit (or 64 bit) and the
code would be incorrect. Of course this code is specific for the MSP430,
but the idea applies to any algorithm or calculation. Finally the
return type follows the *nix standard where a signed integer is returned
such that 0 indicates success and any other value is a failure. Again
this is a personal preference but consistency is always good. Using too
many return types can be confusing and unless there is a need to know
the reason for failure, a simple success or failure status is often
adequate.Now that the calibration data can be validated, let’s take a look at how it can be used to configure the device. The calibration data includes values for 1MHz, 8MHz, 12MHz, and 16MHz based on a 25 degree Celsius ambient temperature. The tags for each frequency setting are stored as two bytes, one contains the value for register DCOCTL and the other for BCSCTL1. Only the fields mentioned above required to configure DCOCLK are set. All other fields in the registers are cleared (except for BCSCTL1[X2OFF] if applicable to the device). To access this calibration data and set the DCOCLK to 1MHz, the following code can be used.
/* Configure the clock module - MCLK = 1MHz */ DCOCTL = 0; BCSCTL1 = CALBC1_1MHZ; DCOCTL = CALDCO_1MHZ;The first line of code clears DCOCTL to set the DCOCLK to the lowest setting. Next the calibration data is copied into the DCOCTL and BCSCTL1 registers respectively using the tags from the TLV area. The DCOCLK is now running at 1MHz. The DCOCLK can also be configured to any of the other supported frequency values in the calibration data using the available tags. Since BCSCTL2 still has its default values the current configuration can be summarized as follows:
- MCLK source is DCOCLK
- MCLK divider is 1, therefore MCLK = DCOCLK = 1MHz
- SMCLK source is DCOCLK
- SMCLK divider is 1, therefore SMCLK = DCOCLK = 1MHz
Part 2: Setting the LED blinking frequency
Now that the CPU frequency is known, the frequency of the blinking LED can be accurately configured. To blink the LED at a specific frequency, the number of CPU cycles to wait between toggling the LED must be calculated. Since the frequency of the CPU is 1MHz, 1 million cycles are executed per second.
This calculation can be implemented as a hash define in the code so that it will be calculated automatically. Using the formula above along with the __delay_cycle function, the code from the last lesson can be modified to set the blinking frequency to 2Hz.
/* LED blinking frequency */
#define LED_BLINK_FREQ_HZ 2
/* Number of cycles to delay based on 1MHz MCLK */
#define LED_DELAY_CYCLES (1000000 / (2 * LED_BLINK_FREQ_HZ))
...
while (1) {
/* Wait for LED_DELAY_CYCLES cycles */
__delay_cycles(LED_DELAY_CYCLES);
/* Toggle P1.0 output */
P1OUT ^= 0x01;
}
Note the following two reasons why a hash define is used to calculate the number of cycles:- The __delay_cycles function only takes a constant argument. If anything other than a constant is passed as an argument to this function, the compiler will throw an error
- Using the hash define means the value is computed only once by the compiler. This makes the code more efficient. It also means the loop is more accurate, because doing division on an MSP430 could take many clock cycles, causing the delay to be longer than intended
Last lesson we briefly touched on the topic of pin configuration. Pin P1.0 could be configured as a digital input or a digital output using the P1DIR register. This is only part of the story. Most pins can actually be configured to perform several different functions. This is called pin multiplexing. Almost every microcontroller supports pin multiplexing on pins which do not have a dedicated function. Each pin is different and will have the ability to be configured for a defined set of peripherals on the chip. Often, as is the case with the MSP430, the default configuration of a pin is a digital input. To configure a pin to use one of its alternate functions, the PxSEL1 and PxSEL2 registers are used. These registers follow the same bit to pin mapping as described in lesson 3. When the bit for a given pin is cleared in both of these registers, as they are on reset, the pin is configured as a digital I/O (also called a general purpose input/output, or GPIO). Setting the appropriate bit in either or both of these registers will enable the pin’s alternate functions. The list of alternate functions for each pin can be found in device datasheet starting from table 16. It is important to note that even if a peripheral function is selected for a specific pin, the other port configuration registers (such as PxDIR) may still have to be appropriately configured. When we begin to use the peripheral devices, this concept will become clear.
The GPIOs on the MSP430 also have the option to be connected to internal pull-up or pull-down resistors through the PxREN registers. When the PxREN bit for a specific pin is set, the P1OUT register controls which resistor (pull-up or pull-down) the pin will be connected to. A pin connected to pull-up/pull-down resistors can be still be driven to the any level by an external device. For example, I2C uses pull-up resistors so that the idle state of the line is high. The master drives the line low to begin communication. Internal pull-ups and pull-downs are rarely used in practice as the value is fixed by the implementation of the microcontroller. Most digital designers prefer to have control over the specific value and also the ability to change it if required. The PxREN registers apply even if the pin is configured as an input.
Now lets go through an example to help solidify your understanding of pin configuration. The objective is to modify the code such that the LED will start blinking only once switch 2 (SW2) on the launchpad has been pressed. Switch 2 is connected to pin P1.3. From the datasheet, we can see all the possible functions of this pin.
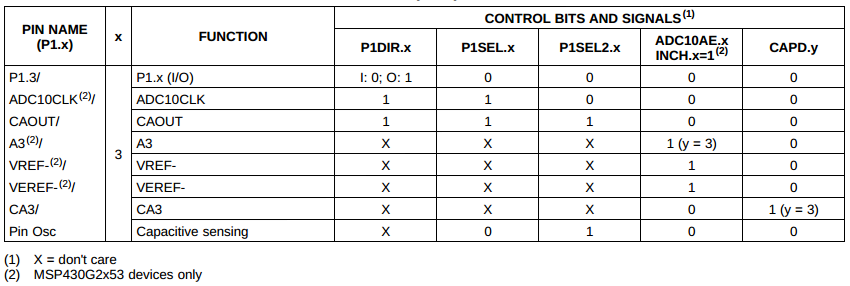 From the MSP430G2553 Datasheet (SLAS735)
From the MSP430G2553 Datasheet (SLAS735)/* Configure P1.3 to digital input */ P1SEL &= ~0x08; P1SEL2 &= ~0x08; P1DIR &= ~0x08; /* Pull-up required for rev 1.5 Launchpad */ P1REN |= 0x08; P1OUT |= 0x08; /* Wait forever until the button is pressed */ while (P1IN & 0x08);Polling a register is a valid way to determine if the input has changed value; however, it is not the best way. While the code sits in an infinite loop waiting for the button to be pressed, nothing else can happen – no other code can be executed. In this simple example, this is not a problem because that is all we want to do. But say you wanted to stop the LED from flashing, when would you read P1IN? If you do it only once per loop, it will only check the value of the pin twice per second. If the button is pushed and released in less than that time, it will not be detected. This is where interrupts come in, and allow the microcontroller to notify the software when the hardware has been changed almost immediately. In the next lesson, we will learn more about the MSP430 architecture which is required to understand how interrupts work. Then in the following lesson we will dive into the very important topic of interrupts.
Lesson 5: The MSP430 Architecture
In lesson 4
we looked at setting up a digital input to read a push button press.
The polling implementation used is rather crude and not ideal in a real
embedded system which interacts with many devices. The solution to this
problem is interrupts, which allows the hardware to signal to the
software that the button has been pressed. The implementation of
interrupts is dependent on the architecture so in this lesson, we will
dive in to the architecture of the MSP430. This will also prove to be
extremely useful when debugging with mspdebug. When you compile the
code, gcc automatically links against libraries which perform all the
architecture and device dependent initialization required before you
even get to ‘main’. Learning about these concepts are necessary to
really understand how interrupts work and how they are implemented.
ELF object files and code sections
We are going to start this tutorial with some high level theory about object files. As we briefly discussed in earlier lessons, an object file is the compiled output of gcc, stored in ELF (Executable and Linkable Format). The ELF format defines the structure of the file, specifically the headers which describe the actual binary content (compiled code) of the file. The structure of the ELF file is interesting to read about, so if you are interested you can find more information here. For the purposes of this lesson, the important aspect of the object file is the concept of sections. Sections are groupings of a certain types of data which are stored in the object file and then transferred to the device flash when it is programmed. The type of section and all its attributes are stored in the section header (defined by the ELF format), and a pointer to where the section data is stored in the file. Section types can vary by architecture, compiler etc, so it is impossible to go through all of them, but there are a few which are almost always present:
Linker scripts
The linker script defines the memory map of the device with respect to the compiled code sections. It is required because the linker needs to know where in memory locate each of the sections of code based on the type of section and its specific attributes. For example, the linker needs to know to locate read/write data in RAM rather than in the flash memory address space. Sometimes linker scripts are modified by the developer to add custom sections for very specific purposes, but more often than not, the default linker script provided by the device manufacturer is sufficient for most all applications. Writing linker scripts is beyond the scope of this course, but we will explore the basics as it applies to this lesson. The linker script for the MSP430G2553 is located at
Next you can see the ‘MEMORY’ tag which begins a table of the regions in memory, including their starting address and length. Most of these components we have already touched on. This table is really just a more detailed breakdown of the memory map introduced in lesson 3. The interrupt vector table will be covered in the next lesson, but if you recall from earlier lessons, it is just a table of functions. Scrolling down you can see the ‘SECTION’ tag which marks the beginning of the script which defines the sections. Skip past the interrupt vectors to the .rodata section. The .rodata section includes all the code compiled in .rodata and .const sections. There are two keywords which are used fairly often in this script, ‘KEEP’ and ‘PROVIDE’. ‘KEEP’ tell the linker to add the symbol in a section even if they are not used. Symbols are the human readable name for a function, variable etc… The symbol to address mapping, as well as the type of symbol and its attributes, is stored in the symbol table. It is used by the linker to resolve addresses while linking code. The linker may clean up unused symbols and code in order to reduce the size of the output. The keyword ‘PROVIDE’ tells the linker to define the symbol, but will only leave it in the symbol table if it used. In the case of .rodata, the symbols exported are all part of the initialization code, and are exported probably because they are required by the libraries. At the end of the .rodata section definition, which ends with a curly brace (“}”) , you can see that is mapped to a region using the greater than operator (“} > ROM”). This means that the .rodata section is to be placed in the ROM region of the memory map.
The .text section is defined next, which is also placed in ROM and provides both the _start symbol and etext/_etext/__etext (all the same symbol unless overloaded). The etext symbol marks the end of the text section. Why would you need this information? Well, for example, like the TLV section that we learned about in lesson 4, we may want to calculate the checksum of the .text section as well. Since we know that _start defines the beginning of the section and etext the end, we can calculate the size and hence the checksum (particularly useful for validating software upgrades in the field). Similarly, in more advanced systems where code should run from RAM for speed, it almost always the case that code is copied from its non-volatile source to RAM, and using these symbols makes this possible. To use the symbols, you must define them as extern in your source code.
Next is the .data section which is stored in ROM, but linked for RAM. This is because as we learned before, the .data section contains initialized variables which are read/write. So on a power up, the values have to be initialized correctly, hence stored in ROM, but linked for use in RAM. This means that although they are initially stored in flash, any code that accesses one of these symbols will be linked to its address in RAM. So how does the data end up in RAM? There is a function in the start-up code which copies the initialized data from ROM to RAM using the symbols provided just below: __romdatastart and __romdatacopysize which are assigned the address of the data in ROM and the size of .data in ROM respectively. The .data section also provide symbols which define the start and end of the the section in RAM: __datastart and __dataend / edata.
The next section in RAM is the .bss. The linker scripts provides the symbols __bssstart, __bssend and __bsssize which are used by the start-up code to zero out the portion of memory. Remember, this section does not actually contain any data. The reason for this is because it can drastically decrease the size of the executable / binary. Imagine on a device that supports Ethernet, you are creating a ring buffer for storing Ethernet frames. Each frame must be 1518 bytes and the ring has 10 elements. That’s 15800 bytes of zeros that would be in your image, which would then have to be flashed to the device. Its not the end of the world, but writing to flash is [relatively] slow, so it can make a difference.
The .noinit section is not used unless data is specifically put there either by directives in assembly or gcc attribute flags in C. Variables in the .noinit section are not initialized at start-up. It could be used for logging and debugging purposes. For example, your code is running and hits some critical error. The only option is to reboot. The error log can be written to a variable in the .noinit section and then when the device resets, the error log will still be there for some recovery code to identify and handle appropriately.
Finally the .stack section, which occupies whatever is left of RAM. At the top of the stack, a symbol __stack is provided which is copied to the stack pointer (explained in the next section) by the initialization code. Notice the stack is not a fixed size. If all the other sections in RAM only leave 2 bytes for the stack section, the compiler won’t complain. It will happily load your code, start running, and by the time one function call is made, or one word (16 bits) is allocated to the stack, you’ve blown the stack. Blowing the stack is a common problem and one that is very hard to identify. The repercussions are unpredictable, and the device may not even crash, it might just start corrupting data. Many operating systems provide stack checking and will at least notify you that you blew the stack. Later in the lesson I will show you how to determine how much stack if left once your code is compiled.
The rest of the linker script is for build and debugging information. Later in the lesson, we will see exactly the symbols defined in the linker script come into play on the MSP430.
CPU registers
Every CPU has a set of registers that can be used to load, store and manipulate data. As we discussed in previous lessons, registers are extremely fast memory. They are also the only way the CPU can perform calculations. For example, if you want to add two numbers both stored in RAM, the CPU cannot simply access the data and load it into the arithmetic logic unit (ALU – the part of the CPU that performs arithmetic operations). Each of the values (or a pointer to them) must be first loaded into registers and then the add operation can be invoked. When you add two variables in C, the compiler takes care of this for you in the most efficient way. Registers have specifically defined purposes as well, so not all registers would be used for the example above. The following diagram from the family reference manual shows the CPU registers in the MSP430.

As for the general purpose registers, these are up for grabs in the compiler implementation. If I wrote a compiler, I could choose any of the general purpose registers to use for passing arguments. Then the next person could come along and choose a different set of registers for passing arguments. If code compiled by one compiler was linked with code compiled by the other, they would not correlate and it would not work. This is why device manufacturers release a specification called an Application Binary Interface, or ABI. This document defines how all of the registers should be used by the compiler, so that code compiled with different compilers that follow the standard can all play nice together.
The MSP430 ABI
The MSP430 ABI is located here. The specification covers topics such as data types, function calling conventions, data allocation, code allocation, etc.. It is a good document to read through for your own knowledge, and since it is defined for the architecture, all MSP430s will follow the same conventions. The information is extremely useful for debugging purposes, because you will be able to trace through the code and understand at the assembly level what the processor is doing. We will not go into depth on the actually assembly language (it is documented in the family reference manual if you are interested) because I want to keep these tutorials as generic as possible so it can be applied to any device. That being said, any time you do low level debugging, you will want to understand at least the basics of the ABI of the architecture you are working with.
At this time it is important to cover the topic of the stack. The stack typically accessed using ‘push’ and ‘pop’ instructions, that it is push some data onto the stack, and then pop it off. A hardware stack is pretty much identical in terms of functionality to a software stack. However, in the case of a hardware stack, the way it is used is defined by the ABI. Often, as is the case with the MSP430, the stack grows downwards, that is, the stack pointer starts off pointing to the top of the stack, and with each push operation, the stack pointer decreases by 2. Why by two? Because that is how this 16-bit architecture is defined. The data and address buses are both 16-bit wide (ignore MSP430X devices), and the stack pointer must always be 16-bit aligned. Similarly, with each pop operation, the stack pointer increases by 2. If you have done any C programming, you know that any variable declared inside a function (as long as it is not declared static), will be allocated on the stack. You also know that it is important to initialize that memory before using it. This is because pushing and popping from the stack only moves the pointer to the current stack location, it does not clear any of the data. So, if you were to declare a variable on the stack, assign a value to it, pop it from the stack, and then declare another variable, that variable would contain the value of the first variable.
Variables are not the only type of data which gets pushed onto the stack. The MSP430 ABI defines two operations to jump into and exit from C functions. These operations are CALL and RET, which are what TI calls ‘emulated’ instructions, because they do not have their own op-code, but are assembled into more than one instruction using the core operations. You can read more about the instruction set and the emulated operations in section 3.4 of the family reference manual. The CALL operation is really two instructions:
When calling a function in C, we can, and often, pass arguments to the called function. How the arguments are stored is defined by the ABI. On the MSP430, registers R12-R15 are reserved for this purpose. R12 is also the register where the return value will be stored. If you have a function that takes one argument of type ‘int’ (ie 16-bits), that argument will be passed using R12. If the function takes two functions, it will use registers R12 and R13, and so on. The compiler will generate the assembly required to do this depending on the definition of the function. So does this mean you are limited to 4 arguments? No, of course not. If your function has more than 4 arguments, the rest of the arguments will be stored on the stack. If any of the arguments are bigger than 16-bits, they may span more than one register. For example, if you pass two 32-bit arguments, the first will be stored in register R12, and R13, and the second in R14 and R15. If there is a third argument, it will be passed on the stack. The details of this are all documented in the ABI, so I won’t cover every possible example, but these are the things to look out of for when following function calls in assembly.
So what about the rest of the registers? R4 – R10 are known as “callee-saved” functions, that is, their contents must be preserved by the calling function. If a value is stored in one of these functions, prior to calling another function, the values must be stored on the stack because the called function may ‘clobber’ them. Clobbered is term used when a register’s value can be changed by a function, often in the context of inline assembly in C. Again, the compiler will take care of this for you if it does need to use any of these registers. Often the compiler will use these registers as temporary storage for variables which are accessed many times in a function (such as the index in a loop) since register access is much faster than any other type of memory access.
Getting practical with objdump
In order to demonstrate all of the above theory, we need to become acquainted with (IMO) one of the most useful tools in the gcc library, objdump. Objdump, which stands for object dump, displays the information and content of an object file. To get a view of the sections which we discussed in the linker script, get the latest code from the repository (tag lesson_5), compile it and run the following command:

You can see at the top the file format is elf-msp430 – objdump extracts the architecture from the object file. Next is a list of the sections, their name, size, start address (VMA = virtual memory address, LMA = load memory address), the offset of the section in the actual file, the alignment and the section attributes. The __reset_vector, .rodata and .text sections make up the ROM memory region. The .rodata starts at address 0xc000 and the size (16 bytes) is determined by the number and size of read-only variables allocated in the code. The .text section follows directly after at 0xc010. The size of this section is determined by the code size once it is compiled. If the sections that make up a memory region are too big to fit, the linker will throw an error saying there is not enough memory to allocate a section in the memory region. On this device, it is especially easy to run into this with RAM. The RAM region consists of the .data and .bss sections, which start at address 0x200. Since this device has 512 bytes of RAM, the top of RAM is at 0x400 (512 = 0x200; RAM base + RAM size = 0x200 + 0x200 = 0x400). Lets now take a look and locate some of those symbols defined in the linker script. To view the symbols in the object file, use the following command:
Remember all these symbols and addresses can be changed by modifying the linker script. If you were going to write your own start-up code, you may decide to change some of these. The sections we discussed are the minimum required (or at least generally accepted), but you can add new sections for your own purposes. Hopefully this is all coming together for you, and once you have a grasp of these concepts it becomes much clearer what is happening with your code. It can help you create better quality code by knowing how and where to allocate memory, and how to design your program. You may often be put in a situation to make a decision whether to code for optimal speed or memory. You can’t always have both, and often memory is limited, so you have to compromise accordingly.
The start-up code
Throughout the lesson we have been learning about the start-up code leading up to to the main function. Lets use objdump to examine this code in detail.
The code following this label does three things, moves __bssstart to R12, clears R13, and then moves __bsssize to R14. Then memset is called. Since the prototype for memset is
Debugging with mspdebug
Now we are going to actually see all that we learned today in action. First lets take a look at the modifications to our code. I want you to be able to see what passing an argument and a stack backtrace looks like so there a new function called _calculate_checksum which will take two arguments – a pointer to the data and the length of the data in bytes – and return the checksum. The body will be essentially the same as the existing _verify_checksum function.
Now lets take a look at what happens in main using mspdebug on our launchpad. Program a.out to the device, and set a breakpoint at main using the following command:

The program counter (PC) is set to 0xc12a as expected, since we told it to break at this address. The stack pointer (SP) is set to 0x3fe, because as we learned earlier, when a function is called, the address of the next instruction is placed on the stack. R12 is set to zero which can be confirmed by the disassembled start-up code we looked at earlier. Now we want to see our new _verify_cal_data function so lets add another breakpoint:

Now, there is an important concept here that needs to be addressed in order to read the memory: endianness. Endianness is the order of bits or bytes in the device. When programming in C the order is standardized (most significant byte and bit on the left) so that it is not architecture dependent and it is the responsibility of the compiler to place the data in the correct ordering. There are several types of endianness and I suggest you read through this if you are not familiar with the concept and ask questions because if you do not understand you will have a very hard time debugging. The MSP430 is a little byte-endian device (see section 2.3 of the MSP430 ABI for more details). This means that if the first byte in the memory dump is actually the least significant byte and the next byte is the most significant byte if storing a standard 16-bit word, as the stack pointer does. If you are storing only a byte, endianness does not apply. So in this case, we can see the first two bytes are 0x02, 0xc2, meaning that the value written to the stack was actually 0xc202. If you look back up to when we broke at _verify_cal_data, this is the address of the next instruction once the current function returns.The next two bytes are also an address, 0xc13e which, if you look at the main function using objdump, is the address of the instruction after calling the _verify_cal_data function. This is very simple example of how to unwind the stack. When you have variables declared in the function, they will be in the stack trace as well. For example _calculate_checksum allocated the variable crc on the stack. To see this variable, we can step through the code using the step command

The stack pointer is now at 0x3f0 (notice the first instruction was to subtract 6 from the stack pointer). The arguments of the function are stored on the stack, as well as the crc counter which is then cleared. The compiler chooses in what order to push the variables onto the stack. Finally, if we delete all the breakpoints and set a new one at 0xc202, when the function returns, we can see this:

If you look at out code, the _verify_cal_data function takes the return value from _calculate_checksum, and adds its to the TLV checksum. We can see that the value returned using R12 is 0x71db. The value from the address 0x10c0 (the TLV checksum) is loaded into R13, and then added to R12. Since the result is stored in R12, and the RET instruction is called next, the _verify_checksum will return sum of these to values, which we learned last lesson, should be zero if the data is valid.
This lesson really only scraps the surface of these concepts, but it enough to get us started. In the next lesson, we will learn about interrupts, and use the concepts from this lesson to help explain how they work and how they are implemented. We will use interrupts to detect our push button press, and modify the code to
ELF object files and code sections
We are going to start this tutorial with some high level theory about object files. As we briefly discussed in earlier lessons, an object file is the compiled output of gcc, stored in ELF (Executable and Linkable Format). The ELF format defines the structure of the file, specifically the headers which describe the actual binary content (compiled code) of the file. The structure of the ELF file is interesting to read about, so if you are interested you can find more information here. For the purposes of this lesson, the important aspect of the object file is the concept of sections. Sections are groupings of a certain types of data which are stored in the object file and then transferred to the device flash when it is programmed. The type of section and all its attributes are stored in the section header (defined by the ELF format), and a pointer to where the section data is stored in the file. Section types can vary by architecture, compiler etc, so it is impossible to go through all of them, but there are a few which are almost always present:
- .data: where initialized read/write data is stored, for example a global or static variable with an non-zero initialized value i.e. int foo = 10; (NOTE: As Joel has pointed out in the comments below, MSPGCC places variables initialized to zero in the data section as well)
- .bss: where uninitialized read/write data is stored, for example, a global or static variable which is not initialized or initialized to zero. This section does not actually contain any data, only a pointer to the beginning of the section and the size. It must be initialized by the start-up code. At the application level, we can assume that statically defined variables are initialized to zero, but on bare-metal embedded systems this is not the case (note: we are on a bare metal system but gcc includes a library which does this initialization for us; this is not always the case).
- .stack: section which defines the stack. On the MSP430, the stack size is not defined, only a pointer to the top of the stack is included in this section. The top of stack is always the top of RAM, so the size of the stack depends on the amount of RAM in the device and how much data is being used by the rest of the program
- .const/.rodata: section where read only data exists. Stored on the flash on the MSP430. May include variables defined as ‘const’ and string literals.
- .text: section where the code is stored. Typically code is always read-only and therefore stored in flash, although on more complex systems, code has to be copied to RAM to run, therefore it can be modified
Linker scripts
The linker script defines the memory map of the device with respect to the compiled code sections. It is required because the linker needs to know where in memory locate each of the sections of code based on the type of section and its specific attributes. For example, the linker needs to know to locate read/write data in RAM rather than in the flash memory address space. Sometimes linker scripts are modified by the developer to add custom sections for very specific purposes, but more often than not, the default linker script provided by the device manufacturer is sufficient for most all applications. Writing linker scripts is beyond the scope of this course, but we will explore the basics as it applies to this lesson. The linker script for the MSP430G2553 is located at
/opt/msp430-toolchain/msp430-none-elf/lib/430/msp430g2553.ldOpen the file in your text editor of choice. The first two lines of the script (past the comments) define the architecture and the entry point, _start. The symbol _start is the default entry point for gcc, and is included as part of the built-in libraries which we compiled when building the toolchain. When the device powers on or comes out of reset, it will jump to the address of this function.
Next you can see the ‘MEMORY’ tag which begins a table of the regions in memory, including their starting address and length. Most of these components we have already touched on. This table is really just a more detailed breakdown of the memory map introduced in lesson 3. The interrupt vector table will be covered in the next lesson, but if you recall from earlier lessons, it is just a table of functions. Scrolling down you can see the ‘SECTION’ tag which marks the beginning of the script which defines the sections. Skip past the interrupt vectors to the .rodata section. The .rodata section includes all the code compiled in .rodata and .const sections. There are two keywords which are used fairly often in this script, ‘KEEP’ and ‘PROVIDE’. ‘KEEP’ tell the linker to add the symbol in a section even if they are not used. Symbols are the human readable name for a function, variable etc… The symbol to address mapping, as well as the type of symbol and its attributes, is stored in the symbol table. It is used by the linker to resolve addresses while linking code. The linker may clean up unused symbols and code in order to reduce the size of the output. The keyword ‘PROVIDE’ tells the linker to define the symbol, but will only leave it in the symbol table if it used. In the case of .rodata, the symbols exported are all part of the initialization code, and are exported probably because they are required by the libraries. At the end of the .rodata section definition, which ends with a curly brace (“}”) , you can see that is mapped to a region using the greater than operator (“} > ROM”). This means that the .rodata section is to be placed in the ROM region of the memory map.
The .text section is defined next, which is also placed in ROM and provides both the _start symbol and etext/_etext/__etext (all the same symbol unless overloaded). The etext symbol marks the end of the text section. Why would you need this information? Well, for example, like the TLV section that we learned about in lesson 4, we may want to calculate the checksum of the .text section as well. Since we know that _start defines the beginning of the section and etext the end, we can calculate the size and hence the checksum (particularly useful for validating software upgrades in the field). Similarly, in more advanced systems where code should run from RAM for speed, it almost always the case that code is copied from its non-volatile source to RAM, and using these symbols makes this possible. To use the symbols, you must define them as extern in your source code.
Next is the .data section which is stored in ROM, but linked for RAM. This is because as we learned before, the .data section contains initialized variables which are read/write. So on a power up, the values have to be initialized correctly, hence stored in ROM, but linked for use in RAM. This means that although they are initially stored in flash, any code that accesses one of these symbols will be linked to its address in RAM. So how does the data end up in RAM? There is a function in the start-up code which copies the initialized data from ROM to RAM using the symbols provided just below: __romdatastart and __romdatacopysize which are assigned the address of the data in ROM and the size of .data in ROM respectively. The .data section also provide symbols which define the start and end of the the section in RAM: __datastart and __dataend / edata.
The next section in RAM is the .bss. The linker scripts provides the symbols __bssstart, __bssend and __bsssize which are used by the start-up code to zero out the portion of memory. Remember, this section does not actually contain any data. The reason for this is because it can drastically decrease the size of the executable / binary. Imagine on a device that supports Ethernet, you are creating a ring buffer for storing Ethernet frames. Each frame must be 1518 bytes and the ring has 10 elements. That’s 15800 bytes of zeros that would be in your image, which would then have to be flashed to the device. Its not the end of the world, but writing to flash is [relatively] slow, so it can make a difference.
The .noinit section is not used unless data is specifically put there either by directives in assembly or gcc attribute flags in C. Variables in the .noinit section are not initialized at start-up. It could be used for logging and debugging purposes. For example, your code is running and hits some critical error. The only option is to reboot. The error log can be written to a variable in the .noinit section and then when the device resets, the error log will still be there for some recovery code to identify and handle appropriately.
Finally the .stack section, which occupies whatever is left of RAM. At the top of the stack, a symbol __stack is provided which is copied to the stack pointer (explained in the next section) by the initialization code. Notice the stack is not a fixed size. If all the other sections in RAM only leave 2 bytes for the stack section, the compiler won’t complain. It will happily load your code, start running, and by the time one function call is made, or one word (16 bits) is allocated to the stack, you’ve blown the stack. Blowing the stack is a common problem and one that is very hard to identify. The repercussions are unpredictable, and the device may not even crash, it might just start corrupting data. Many operating systems provide stack checking and will at least notify you that you blew the stack. Later in the lesson I will show you how to determine how much stack if left once your code is compiled.
The rest of the linker script is for build and debugging information. Later in the lesson, we will see exactly the symbols defined in the linker script come into play on the MSP430.
CPU registers
Every CPU has a set of registers that can be used to load, store and manipulate data. As we discussed in previous lessons, registers are extremely fast memory. They are also the only way the CPU can perform calculations. For example, if you want to add two numbers both stored in RAM, the CPU cannot simply access the data and load it into the arithmetic logic unit (ALU – the part of the CPU that performs arithmetic operations). Each of the values (or a pointer to them) must be first loaded into registers and then the add operation can be invoked. When you add two variables in C, the compiler takes care of this for you in the most efficient way. Registers have specifically defined purposes as well, so not all registers would be used for the example above. The following diagram from the family reference manual shows the CPU registers in the MSP430.
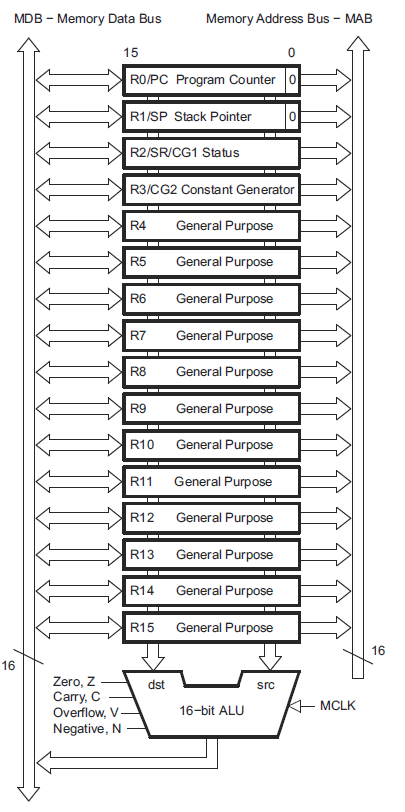
CPU Registers – from section 3.1 of SLAU144
To better understand this diagram, lets take a look at the purpose and use of each of these registers.- program counter: contains the address of the current instruction. After each operation is completed, the program counter is incremented and the instruction at this address is read into the CPU and executed. The program counter on the MSP430 is register R0
- stack pointer: points to the address where the last value pushed on the stack is stored
- status register: a register that consists of a set of status fields such as carry, zero, overflow, negative, etc..
- constant generator: generate 6 predefined commonly used constant values for efficiency
- general purpose registers: used for arithmetic as above, passing arguments to functions etc…
As for the general purpose registers, these are up for grabs in the compiler implementation. If I wrote a compiler, I could choose any of the general purpose registers to use for passing arguments. Then the next person could come along and choose a different set of registers for passing arguments. If code compiled by one compiler was linked with code compiled by the other, they would not correlate and it would not work. This is why device manufacturers release a specification called an Application Binary Interface, or ABI. This document defines how all of the registers should be used by the compiler, so that code compiled with different compilers that follow the standard can all play nice together.
The MSP430 ABI
The MSP430 ABI is located here. The specification covers topics such as data types, function calling conventions, data allocation, code allocation, etc.. It is a good document to read through for your own knowledge, and since it is defined for the architecture, all MSP430s will follow the same conventions. The information is extremely useful for debugging purposes, because you will be able to trace through the code and understand at the assembly level what the processor is doing. We will not go into depth on the actually assembly language (it is documented in the family reference manual if you are interested) because I want to keep these tutorials as generic as possible so it can be applied to any device. That being said, any time you do low level debugging, you will want to understand at least the basics of the ABI of the architecture you are working with.
At this time it is important to cover the topic of the stack. The stack typically accessed using ‘push’ and ‘pop’ instructions, that it is push some data onto the stack, and then pop it off. A hardware stack is pretty much identical in terms of functionality to a software stack. However, in the case of a hardware stack, the way it is used is defined by the ABI. Often, as is the case with the MSP430, the stack grows downwards, that is, the stack pointer starts off pointing to the top of the stack, and with each push operation, the stack pointer decreases by 2. Why by two? Because that is how this 16-bit architecture is defined. The data and address buses are both 16-bit wide (ignore MSP430X devices), and the stack pointer must always be 16-bit aligned. Similarly, with each pop operation, the stack pointer increases by 2. If you have done any C programming, you know that any variable declared inside a function (as long as it is not declared static), will be allocated on the stack. You also know that it is important to initialize that memory before using it. This is because pushing and popping from the stack only moves the pointer to the current stack location, it does not clear any of the data. So, if you were to declare a variable on the stack, assign a value to it, pop it from the stack, and then declare another variable, that variable would contain the value of the first variable.
Variables are not the only type of data which gets pushed onto the stack. The MSP430 ABI defines two operations to jump into and exit from C functions. These operations are CALL and RET, which are what TI calls ‘emulated’ instructions, because they do not have their own op-code, but are assembled into more than one instruction using the core operations. You can read more about the instruction set and the emulated operations in section 3.4 of the family reference manual. The CALL operation is really two instructions:
- push the address of the next instruction (current program counter + 2) onto the stack
- load the destination address of the CALL instruction into the program counter
- pop the address of the next instruction off the stack back into the program counter
When calling a function in C, we can, and often, pass arguments to the called function. How the arguments are stored is defined by the ABI. On the MSP430, registers R12-R15 are reserved for this purpose. R12 is also the register where the return value will be stored. If you have a function that takes one argument of type ‘int’ (ie 16-bits), that argument will be passed using R12. If the function takes two functions, it will use registers R12 and R13, and so on. The compiler will generate the assembly required to do this depending on the definition of the function. So does this mean you are limited to 4 arguments? No, of course not. If your function has more than 4 arguments, the rest of the arguments will be stored on the stack. If any of the arguments are bigger than 16-bits, they may span more than one register. For example, if you pass two 32-bit arguments, the first will be stored in register R12, and R13, and the second in R14 and R15. If there is a third argument, it will be passed on the stack. The details of this are all documented in the ABI, so I won’t cover every possible example, but these are the things to look out of for when following function calls in assembly.
So what about the rest of the registers? R4 – R10 are known as “callee-saved” functions, that is, their contents must be preserved by the calling function. If a value is stored in one of these functions, prior to calling another function, the values must be stored on the stack because the called function may ‘clobber’ them. Clobbered is term used when a register’s value can be changed by a function, often in the context of inline assembly in C. Again, the compiler will take care of this for you if it does need to use any of these registers. Often the compiler will use these registers as temporary storage for variables which are accessed many times in a function (such as the index in a loop) since register access is much faster than any other type of memory access.
Getting practical with objdump
In order to demonstrate all of the above theory, we need to become acquainted with (IMO) one of the most useful tools in the gcc library, objdump. Objdump, which stands for object dump, displays the information and content of an object file. To get a view of the sections which we discussed in the linker script, get the latest code from the repository (tag lesson_5), compile it and run the following command:
cd ~/msp430_launchpad /opt/msp430-toolchain/bin/msp430-objdump -h a.out | lessThe’-h’ flag tell objdump to print the section headers. Pipe the output to ‘less’ so you can scroll down (and back up) rather than going directly to the end of the output. The output should look something like this:
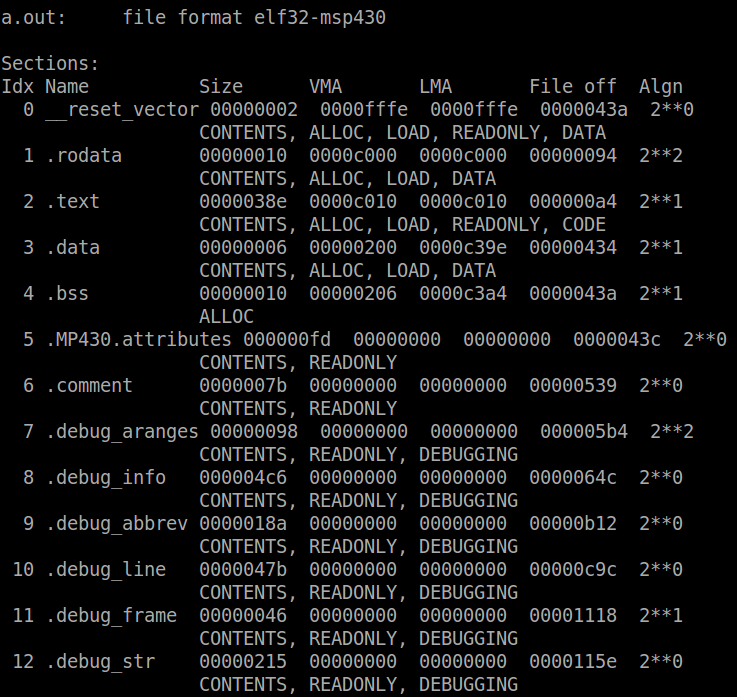
You can see at the top the file format is elf-msp430 – objdump extracts the architecture from the object file. Next is a list of the sections, their name, size, start address (VMA = virtual memory address, LMA = load memory address), the offset of the section in the actual file, the alignment and the section attributes. The __reset_vector, .rodata and .text sections make up the ROM memory region. The .rodata starts at address 0xc000 and the size (16 bytes) is determined by the number and size of read-only variables allocated in the code. The .text section follows directly after at 0xc010. The size of this section is determined by the code size once it is compiled. If the sections that make up a memory region are too big to fit, the linker will throw an error saying there is not enough memory to allocate a section in the memory region. On this device, it is especially easy to run into this with RAM. The RAM region consists of the .data and .bss sections, which start at address 0x200. Since this device has 512 bytes of RAM, the top of RAM is at 0x400 (512 = 0x200; RAM base + RAM size = 0x200 + 0x200 = 0x400). Lets now take a look and locate some of those symbols defined in the linker script. To view the symbols in the object file, use the following command:
/opt/msp430-toolchain/bin/msp430-objdump -t a.out | lessScroll down or search for the symbol ‘_start’. It should be located at address 0xc010. We know that the .text section should start at 0xc010, and therefore the ‘_start’ symbol is located at this address. Similarly, the first symbol of the .data section is __data_start, which we would expect to be located at address 0x200 – and it is. Another interesting symbol to look at is __romdatastart, which is at 0xc2d4. If you were look at the memory starting at this symbol, it would be the same as __data_start, since the start-up code copies the initialized data from this location to the latter. Finally, the symbol declaring the top of the stack, ‘__stack’, is located at 0x400, as expected. The size of available stack is determined by calculating the difference between the top of stack and the end of the previous section, in this case .noinit. This is easier done using a similar but different utility called ‘nm’, which dumps the symbols from an object file.
nm -n a.out | lessThis command puts the symbols in order of their address using the ‘-n’ flag. The last symbol before ‘__stack’ is ‘end’, which marks the end of the .noinit section. Therefore the stack available will be 0x400 – 0x216 = 0x1EA = 490 bytes.
Remember all these symbols and addresses can be changed by modifying the linker script. If you were going to write your own start-up code, you may decide to change some of these. The sections we discussed are the minimum required (or at least generally accepted), but you can add new sections for your own purposes. Hopefully this is all coming together for you, and once you have a grasp of these concepts it becomes much clearer what is happening with your code. It can help you create better quality code by knowing how and where to allocate memory, and how to design your program. You may often be put in a situation to make a decision whether to code for optimal speed or memory. You can’t always have both, and often memory is limited, so you have to compromise accordingly.
The start-up code
Throughout the lesson we have been learning about the start-up code leading up to to the main function. Lets use objdump to examine this code in detail.
/opt/msp430-toolchain/bin/msp430-objdump -S a.out | lessThis command uses the ‘-S’ switch to tell objdump to dump the source code mixed with the disassembly (assembly version of your source code). Disassembly only applies to the .text section of the object file, since it is the section that contains the code. The first symbol we see is – big surprise – ‘_start’. The first thing that start does it moves the value of ‘__stack’ (1024 = 0x400) to the stack pointer, R1. The ‘#’ before the symbol means it is moved as an immediate value – i.e. its not loaded from a register, as the value is stored directly in the instruction. Next the watchdog is disabled (which we do again in our code). Then comes the first label (not necessarily a function) ‘__crt0_init_bss’. Side note: assembly is read sequentially through labels – i.e. if there is no branch instruction, the next instruction is loaded regardless of whether it is part of another label. A label could represent a C function, in which case it would be branched to and have a “RET’ instruction at the end. But if written in assembly as some of the start-up code is, it doesn’t have to. Crt0 is the generic name of the start-up code and stands for C run-time. If you have ever tried to compile code and got a linker error saying that the symbol _start cannot be found, you’re likely to be missing crt0.o.
The code following this label does three things, moves __bssstart to R12, clears R13, and then moves __bsssize to R14. Then memset is called. Since the prototype for memset is
int memset(void *ptr, int fill, size_t nbytes)we can deduce that the following was called
memset(__bssstart, 0, __bsssize);In other words, this clears the .bss section, as the function name indicates. Next we have the label __crt0_movedata. The symbol __datastart is moved to r13, __romdatastart is moved into r13 and __romdatacopysize is moved into r14. Then memmove is called, so the C implementation would be:
memmove(__datastart, __romdatastart, __romdatacopysize);which will copy the .data section from flash to RAM so that it can be accessed and modified as required. Next __msp430_init is called, which sets up some C++ exception handlers and may perform some initialization of the standard C library. Finally, R12 is cleared and then our main function is called. Pretty simple, but imperative for code to ever run.
Debugging with mspdebug
Now we are going to actually see all that we learned today in action. First lets take a look at the modifications to our code. I want you to be able to see what passing an argument and a stack backtrace looks like so there a new function called _calculate_checksum which will take two arguments – a pointer to the data and the length of the data in bytes – and return the checksum. The body will be essentially the same as the existing _verify_checksum function.
static uint16_t _calculate_checksum(uint16_t *data, size_t len)
{
uint16_t crc = 0;
len = len / 2;
while (len-- > 0) {
crc ^= *(data++);
}
return crc;
}
Now the _verify_checksum function is stripped down to simply call
_calculate_checksum with the correct parameters, and add the result to
the value of TLV_CHECKSUM tag and return the result.static int _verify_cal_data(void)
{
return (TLV_CHECKSUM + _calculate_checksum((uint16_t *) 0x10c2, 62));
}
What would you expect the compiled code to look do in terms of
registers in order to call _calculate_checksum? In the _verify_checksum
function, the address of the data needs to be loaded into register R12,
and the length of the data into R13. Then the CALL instruction would be
used to branch to _calcualate_checksum. When the function returns, the
return value will be loaded into R12, and the RET instruction will be
called.Now lets take a look at what happens in main using mspdebug on our launchpad. Program a.out to the device, and set a breakpoint at main using the following command:
setbreak 0xc12awhere 0xc12a is the address of main. Using the old msp430-gdb (before TI took it over), mspdebug used to be able to parse the symbol table and you could tell it to break on a symbol, but somehow that broke. I am looking into it, but no guarantees. Now run the code. The program will run until the main function is called and then stop. When mspdebug hits a breakpoint, it prints out the registers. Lets take a look at these.
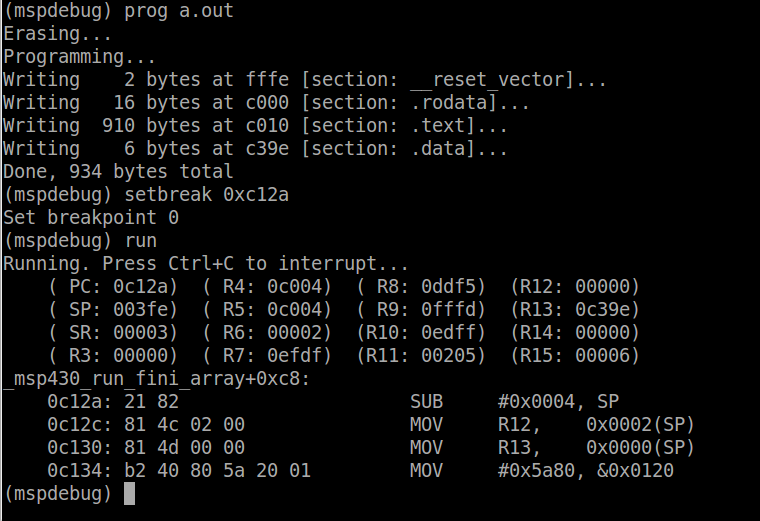
The program counter (PC) is set to 0xc12a as expected, since we told it to break at this address. The stack pointer (SP) is set to 0x3fe, because as we learned earlier, when a function is called, the address of the next instruction is placed on the stack. R12 is set to zero which can be confirmed by the disassembled start-up code we looked at earlier. Now we want to see our new _verify_cal_data function so lets add another breakpoint:
setbreak 0xc1f6and run again. In the disassembled code provided by mspdebug, we can see that the next two instructions will load the address of the TLV section into R12 and the size into R13 and then call whatever function is at 0xc20a, which is _calculate_checksum. Set one more breakpoint at this address, however, in order to do so we must remove one breakpoint since mspdebug supports up to 2 breakpoints. We can delete the first breakpoint (at main) by using the following command
delbreak 0where 0 is the index of the breakpoint. Now run one more time. We can see that registers R12 and R13 are set as expected, and the stack pointer is 0x3f6. Now lets try unwinding the stack. To view the memory at the stack pointer, use the md command:
md 0x3f6
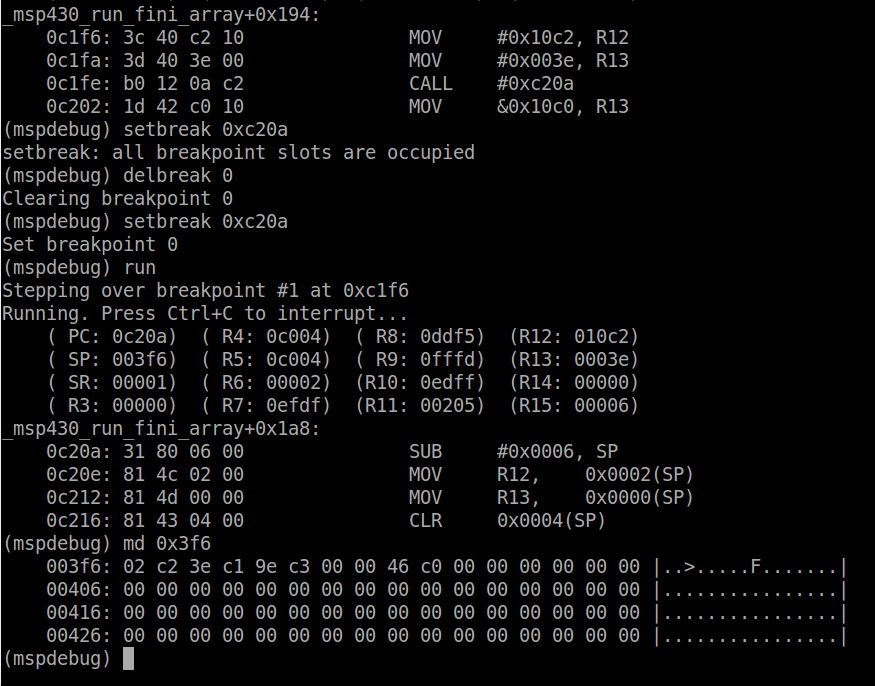
Now, there is an important concept here that needs to be addressed in order to read the memory: endianness. Endianness is the order of bits or bytes in the device. When programming in C the order is standardized (most significant byte and bit on the left) so that it is not architecture dependent and it is the responsibility of the compiler to place the data in the correct ordering. There are several types of endianness and I suggest you read through this if you are not familiar with the concept and ask questions because if you do not understand you will have a very hard time debugging. The MSP430 is a little byte-endian device (see section 2.3 of the MSP430 ABI for more details). This means that if the first byte in the memory dump is actually the least significant byte and the next byte is the most significant byte if storing a standard 16-bit word, as the stack pointer does. If you are storing only a byte, endianness does not apply. So in this case, we can see the first two bytes are 0x02, 0xc2, meaning that the value written to the stack was actually 0xc202. If you look back up to when we broke at _verify_cal_data, this is the address of the next instruction once the current function returns.The next two bytes are also an address, 0xc13e which, if you look at the main function using objdump, is the address of the instruction after calling the _verify_cal_data function. This is very simple example of how to unwind the stack. When you have variables declared in the function, they will be in the stack trace as well. For example _calculate_checksum allocated the variable crc on the stack. To see this variable, we can step through the code using the step command
stepRepeat the command 4 times so that we have executed up to the CLR instruction.

The stack pointer is now at 0x3f0 (notice the first instruction was to subtract 6 from the stack pointer). The arguments of the function are stored on the stack, as well as the crc counter which is then cleared. The compiler chooses in what order to push the variables onto the stack. Finally, if we delete all the breakpoints and set a new one at 0xc202, when the function returns, we can see this:
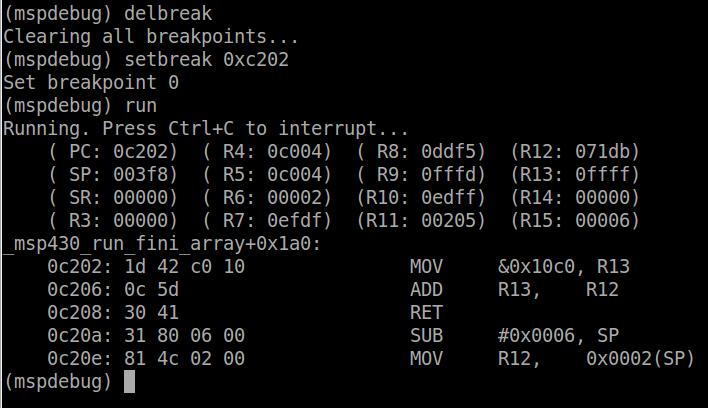
If you look at out code, the _verify_cal_data function takes the return value from _calculate_checksum, and adds its to the TLV checksum. We can see that the value returned using R12 is 0x71db. The value from the address 0x10c0 (the TLV checksum) is loaded into R13, and then added to R12. Since the result is stored in R12, and the RET instruction is called next, the _verify_checksum will return sum of these to values, which we learned last lesson, should be zero if the data is valid.
This lesson really only scraps the surface of these concepts, but it enough to get us started. In the next lesson, we will learn about interrupts, and use the concepts from this lesson to help explain how they work and how they are implemented. We will use interrupts to detect our push button press, and modify the code to
Lesson 6: Interrupts
After much anticipation, we have finally got to the topic that I
keep on mentioning, but never explain – interrupts! Interrupts are
probably the single most important concept that make every electronic
device work as it does. If interrupts didn’t exist, your electronic
devices wouldn’t be as responsive, fast and efficient as they are. They
are the source for all types of timers and ticks and integrated into
most peripherals. Every CPU has interrupt capabilities, although the
capabilities vary widely. Interrupts are sometimes neglected because its
‘easier’ to poll than implement interrupts but its generally considered
poor design. So what are interrupts? They are really just a way for the
hardware to signal the software that some event has occurred. Each
event has an entry in what is called the interrupt vector table – a
table of pointers to functions stored in memory (either flash or RAM),
which the CPU will jump to automatically when the interrupt fires. These
functions are called interrupt service routines (ISR), and though some
may be included as part of the compiler libraries, most need to be
implemented by the programmer. Interrupt service routines must be as
quick and efficient as possible, so as to not stall the software which
was executing. They must also be efficient with the stack. In operating
system environments, interrupt handlers may operate on a separate
[software] stack which is much smaller than a typical process or thread
stack. Also, no blocking calls should be made. Taking too long in the
ISR can result in lost data or events. Interrupts have attributes that
may or may be programmable, depending on the architecture and the
device. In this lesson, we will learn about the different types of
interrupts, their attributes, how to implement them, what happens when
an interrupt fires, and how they are used in real world applications.
The generic interrupt vector table is available in table 2-1 of the
family reference manual, while device specific vectors are defined in
table 5 of the datasheet.
Enabling and disabling interrupts
Most interrupts can be enabled or disabled by software. Typically there is a register that will perform the function globally for all interrupts or groups of interrupts, and then additional registers for individual interrupts. Disabling an interrupt is often referred to as ‘masking’ the interrupt. Interrupts are almost always accompanied by a status or flag register which the software can read to determine if a specific interrupt has fired. This is required because sometimes many physical interrupts are connected to the same interrupt request (IRQ) – the signal to the CPU. The flag is required because the interrupt line may only be active for a very short amount of time and the software may not respond fast enough. The flag ensures the the state of the interrupt is stored somewhere until it is read and cleared by the software. It is also often used to acknowledge and clear the interrupt, as is the case with the MSP430. Enabling and disabling interrupts in the MSP430 at a global level is done through the status register. We have not looked in detail at the contents of the status register, so lets do that now.

Edge vs level based, active high / active low
One very common use for interrupts is to detect changes in GPIO inputs. Stemming from our push button code which has to poll the P1IN register, enabling an interrupt on a GPIO would allow the hardware to signal the software when the input has changed values. Not all GPIOs are interrupt capable, so remember to check in the device datasheet when choosing which pin to connect it to. GPIO interrupts have their own subset of properties. The first property is the active signal level – either active high or active low. Active high means that the signal is interpreted as active when the line is high (a positive voltage), while active low means the signal is interpreted as active when the line is low (0V or ground). However, the second property, edge vs level based (also known as edge or level triggered interrupts), defines when the interrupt actually fires. Edge based interrupts will only fire once as the state of the line transitions from the inactive level to the active level. Level based interrupts will fire continuously while the input is at the active level. In order to handle a level based interrupt, the ISR should mask it so that it does not fire continuously and effectively stall the CPU. Once the source of the interrupt is cleared, the interrupt may be enabled so it can fire again. Level based interrupts are sometimes used to perform handshaking between the source of the interrupt and the software handling it. The software would enter the ISR, check the status of the source of the interrupt to determine exactly what caused the interrupt (remember multiple sources per IRQ), and then clear source condition and the flag. If the interrupt condition is successfully cleared, the line will return to the inactive state and the software will continue on. Otherwise, the line will remain active and the interrupt would fire again. The MSP430 only supports edge based interrupts.
Interrupt priorities
Another important attribute of interrupts is the priority. Interrupt priorities determine which interrupt service routine will be called first if two interrupts fire at the same time. Depending on the interrupt controller, some interrupt priorities may be configurable by software. The MSP430 does not support this, all interrupts have a fixed priority. The interrupt priorities on the MSP430 are in descending order from highest address in the vector table to the lowest. One important concept related to interrupt priorities is interrupt nesting. If one interrupt fires and the ISR is invoked, and while in the ISR another interrupt of a high priority fires, the executing ISR may be interrupted by the higher priority one. Once the higher priority ISR has completed, the lower priority ISR is then allowed to complete. In the case of the MSP430, nesting is not dependant on the priority. Any priority interrupt will be serviced immediately if nested interrupts are enabled. Nesting interrupts is an advanced topic an will not be enabled for this tutorial. If an interrupt fires while an ISR is executing, it will be serviced only once the ISR is complete.
Reset vector
The reset vector is the single most important interrupt available. Without it, code would never begin executing. The compiler [typically] automatically populates the reset vector with the address of the entry point of the .text section, i.e. the __start function. When a device is powered on or the reset pin is toggled, the reset vector is sourced and the CPU jumps to the address it contains. Going back to the linker script from last lesson, the table of memory regions has a region defined for each interrupt vector. A region called RESETVEC is located at 0xFFFE, defined with a size of 2 bytes. Then a section called __reset_vector is created and assigned to this memory location. The data allocated to this section will be the address of the reset vector ISR. To show that the reset vector is assigned the start-up code, the following command can be used:

The first couple lines of code are all we are interested in. We can see that the first section in the output is the reset vector. In it there is only one label: ‘__msp430_resetvec_hook’. At this label there is 2 bytes of data allocated with the value of 0xc010 (keep in mind the endianess). Search for 0xc010, and you will see that this is the address of __start, the entry point. Therefore as expected, when sourced the reset vector shall cause the CPU to jump to the start-up code.
The watchdog timer
The watchdog is another very important interrupt. It is actually a whole module which is implemented as part of almost every MCU, SoC, etc… The purpose of the watchdog is to ensure that the software is running and had not stopped, crashed or otherwise been suspended. It is very rare that you find an embedded system without a watchdog. If implemented correctly in both hardware and software, the device should never stall indefinitely. Once enabling the watchdog, the software must pet it periodically with an interval less than its timeout. Failure to do so will result in the watchdog resetting the device. In the case of the MSP430, the watchdog interrupt is the same as the reset vector, so a watchdog interrupt will reset the device. Some devices have more complex watchdogs which generate an intermediate interrupt to allow the software to perform any logging or cleanup operations before resetting. The MSP430 watchdog module does not support this, but it has an additional interesting feature – it can be configured as a regular 16-bit timer. This could be useful if an additional timer if needed. We will be configuring the watchdog in watchdog mode because it is important to understand how to setup the module and how it should be maintained by the software. The watchdog is configured and monitored through the 16-bit register WDTCTL and two additional registers, interrupt enable 1 (IE1) and interrupt flag 1 (IFG1).

The field of these registers are defined as follows:

The value of the IE1 is 0x7, therefore the WDTIFG bit is set. It is important to note that the other bits which are set are defined by the device specific implementation which can be found in the datasheet. They are PORIFG (bit 2), the power on reset interrupt flag, and OFIFG (bit 1), the oscillator fault interrupt flag. These two bits are set because that is their default value after reset. Now we will pet the watchdog to prevent it from resetting the device. Call _watchdog_pet inside the while loop that toggles the LED.
Interrupt handling on the MSP430
Now we will get into the details of interrupt handling on the MSP430. When an interrupt fires, a few things have to happen before entering the ISR:
The ISR has some responsibilities of its own before executing the application code. If written in C, this is taken care of by the compiler. In assembly it must be implemented manually. To see how this works, we are going to create an interrupt service routine in C to detect the button press. Unfortunately, there is no way defined by the C programming language on how to declare an interrupt handler, it is left up to the compiler. Therefore what you will learn is only applicable for gcc and may look slightly different on other compilers. To declare an ISR in gcc you must use the ‘attributes’ feature. Attributes provide additional functionality which are non-standard. When possible, using attributes should be avoided so that the code is compiler agnostic (read – portable from one compiler to another). There are some attributes which are common across compilers and it is often considered good practice to define them as macros in a separate header file (often name compiler.h) which uses hash defines to compile the macros relevant for that compiler. To declare the interrupt service routine, we first need to figure out which interrupt we are going to write an ISR for. On the MSP430, each IO port is assigned an interrupt. It is up to the software to determine which pin on the port was the source. So how so do we refer to this interrupt? Open the msp430g2553.h header file and search for ‘PORT1_VECTOR’. You will find the list of interrupt vectors for this device. The desired vector should be passed to the interrupt attribute. It tells the compiler in which section to place the address of your ISR. Therefore, our empty function declaration would look like this:

We can see that a new section has been added called __interrupt_vector_3. To understand this we need to go to the datasheet and find the address of the interrupt vector for port 1 (since our button is connected to P1.3). The vector is located at address 0xFFE4. In the linker script memory region table, this address is part of the region VECT3. In the sections table, we can see that the section __interrupt_vector_3 is loaded into region VECT3. This means that when passing vector 3 (which PORT1_VECTOR is defined as) to the interrupt attribute, the compiler will place the address of that function at 0xFFE4. From the objdump output, we can see the value at 0xFFE4 is 0xC278. Search in the rest of the file for this address and you will find that it is in fact our function port1_isr. Currently the function is empty, so lets go back and fill it in. In order to start or stop the the blinking LED using the push button, we will need some sort of signal between our main function and the ISR. We will use a simple variable which will be toggled by the ISR.

The first operation is to push R12 onto the stack. R12 is the register the compiler is going to use to toggle the variable _blink_enable. It must ensure that the previous value is stored because it may be used by the function which has been interrupted. If the ISR clobbers the register value, when the interrupted function continues execution, the register would have the wrong value. This applies to all registers and it is up to the compiler to determine which registers are used by the ISR and thus must be pushed on the stack. In this case only R12 is being used, so the most efficient implementation is to push only R12. Now that R12 is free to use, it can be used to check the value of P1IFG and ensure the flag is set. Then in order to acknowledge the interrupt so it doesn’t fire again, the flag must be cleared. The address of P1IFG (0x23) is loaded into R12 and bit 3 is cleared. Finally the address of our variable _blink_enable is loaded into the register and the value is XOR’d with 0x1. The stack is popped back into R12 to restore the initial value before returning. To return from an interrupt, the RETI pseudo-instruction is used. RETI, which stands from return from interrupt, tells the CPU to pop off the SR and PC values back into their respective registers. Now that all the registers are exactly as they were before the interrupt fired, the flow of execution continues on as if nothing happened. Now program the device and run the new code. The LED will begin blinking once the button is pressed, and pressing the button again will toggle the blinking on or off. Set a breakpoint at port1_isr. When the button is pressed the CPU will be stopped at the ISR. The stack pointer is set to ~0x3f4 (depending where exactly the code was interrupted) and dumping the memory at this location, we can see the result of entering the ISR.

The first 2 bytes on the stack will be the SR. The value of the status register stored in the stack will be different from that currently dumped by mspdebug since it is cleared by the hardware. The next 2 bytes will be the PC, in this case 0xc2b0. Using objdump to view the code at this address, we can see that the CPU was interrupted right at the end of _watchdog_pet, which is called within the while loop, as expected. Your values may differ slightly depending where exactly the PC was when you pressed the button. What we really have experienced here is something commonly known as a context switch. It is the foundation of all software, not just embedded systems. Almost every operating system uses context switching to some extent, usually triggered by an interval timer firing an interrupt periodically. This is what allows you have to many threads and processes running on just one CPU. Its the illusion of parallel operation through the use of extremely fast context changes many times per second. The definition of the context is dependent on the architecture. In the case of the MSP430, it is all the main CPU registers we have discussed in the last lesson. When the ISR fires, we have to save all of these registers that could be modified so when the interrupt completes, the context can be restored. A context switch of a thread or task (synonymous terms) would have to save all the registers on its stack before restoring the registers for the task about to run. There is some really interesting stuff here, and this is only an introduction. We will not be creating a multi-threaded system since that is way beyond the scope of this course, but interrupts are a form of context switch so it is important to understand how powerful and important they really are in embedded systems.
Enabling and disabling interrupts
Most interrupts can be enabled or disabled by software. Typically there is a register that will perform the function globally for all interrupts or groups of interrupts, and then additional registers for individual interrupts. Disabling an interrupt is often referred to as ‘masking’ the interrupt. Interrupts are almost always accompanied by a status or flag register which the software can read to determine if a specific interrupt has fired. This is required because sometimes many physical interrupts are connected to the same interrupt request (IRQ) – the signal to the CPU. The flag is required because the interrupt line may only be active for a very short amount of time and the software may not respond fast enough. The flag ensures the the state of the interrupt is stored somewhere until it is read and cleared by the software. It is also often used to acknowledge and clear the interrupt, as is the case with the MSP430. Enabling and disabling interrupts in the MSP430 at a global level is done through the status register. We have not looked in detail at the contents of the status register, so lets do that now.

- V: overflow bit
- Set when the result of an arithmetic operation overflows the signed-variable range
- SCG1: system clock generator 1 (SMCLK) enable / disable
- 0 – SMCLK is on
- 1 – SMCLK is off
- SCG0: system clock generator 0 (DCOCLK) enable / disable
- 0 – DCO generator enabled
- 1 – DCO generator disabled is DCOCLK is not the used for MCLK or SMCLK
- OSCOFF: enable / disable LFXT1 crystal oscillator
- 0 – enable LFXT1 crystal oscillator
- 1 – disable LFXT1 crystal oscillator when LFXT1CLK is not used for MCLK or SMCLK.
- CPUOFF: Turn the CPU on or off
- o – CPU on
- 1 – CPU off
- GIE: General interrupt enable
- 0 – disable interrupts globally (NMIs not included)
- 1 – enable interrupts globally (note: interrupts still need to be enabled individually by their respective interrupt enable register)
- N: negative bit
- 0 – when result of an operation is positive
- 1 – when the result of an operation is negative
- Z: zero bit
- 0 – when the result of an operation is non-zero
- 1 – when the result of an operation is zero
- C: carry bit
- 0 – when the result of an operation does not contain a carry bit
- 1 – when the result of an operation produes a carry bit
- Oscillator fault: the clock module has detected a fault in the oscillator
- Flash memory access violation: the flash memory was accessed while busy
- NMI: the reset pin on the device can be configured to NMI mode and when it becomes active it will source this interrupt
Edge vs level based, active high / active low
One very common use for interrupts is to detect changes in GPIO inputs. Stemming from our push button code which has to poll the P1IN register, enabling an interrupt on a GPIO would allow the hardware to signal the software when the input has changed values. Not all GPIOs are interrupt capable, so remember to check in the device datasheet when choosing which pin to connect it to. GPIO interrupts have their own subset of properties. The first property is the active signal level – either active high or active low. Active high means that the signal is interpreted as active when the line is high (a positive voltage), while active low means the signal is interpreted as active when the line is low (0V or ground). However, the second property, edge vs level based (also known as edge or level triggered interrupts), defines when the interrupt actually fires. Edge based interrupts will only fire once as the state of the line transitions from the inactive level to the active level. Level based interrupts will fire continuously while the input is at the active level. In order to handle a level based interrupt, the ISR should mask it so that it does not fire continuously and effectively stall the CPU. Once the source of the interrupt is cleared, the interrupt may be enabled so it can fire again. Level based interrupts are sometimes used to perform handshaking between the source of the interrupt and the software handling it. The software would enter the ISR, check the status of the source of the interrupt to determine exactly what caused the interrupt (remember multiple sources per IRQ), and then clear source condition and the flag. If the interrupt condition is successfully cleared, the line will return to the inactive state and the software will continue on. Otherwise, the line will remain active and the interrupt would fire again. The MSP430 only supports edge based interrupts.
Interrupt priorities
Another important attribute of interrupts is the priority. Interrupt priorities determine which interrupt service routine will be called first if two interrupts fire at the same time. Depending on the interrupt controller, some interrupt priorities may be configurable by software. The MSP430 does not support this, all interrupts have a fixed priority. The interrupt priorities on the MSP430 are in descending order from highest address in the vector table to the lowest. One important concept related to interrupt priorities is interrupt nesting. If one interrupt fires and the ISR is invoked, and while in the ISR another interrupt of a high priority fires, the executing ISR may be interrupted by the higher priority one. Once the higher priority ISR has completed, the lower priority ISR is then allowed to complete. In the case of the MSP430, nesting is not dependant on the priority. Any priority interrupt will be serviced immediately if nested interrupts are enabled. Nesting interrupts is an advanced topic an will not be enabled for this tutorial. If an interrupt fires while an ISR is executing, it will be serviced only once the ISR is complete.
Reset vector
The reset vector is the single most important interrupt available. Without it, code would never begin executing. The compiler [typically] automatically populates the reset vector with the address of the entry point of the .text section, i.e. the __start function. When a device is powered on or the reset pin is toggled, the reset vector is sourced and the CPU jumps to the address it contains. Going back to the linker script from last lesson, the table of memory regions has a region defined for each interrupt vector. A region called RESETVEC is located at 0xFFFE, defined with a size of 2 bytes. Then a section called __reset_vector is created and assigned to this memory location. The data allocated to this section will be the address of the reset vector ISR. To show that the reset vector is assigned the start-up code, the following command can be used:
/opt/msp430-toolchain/bin/msp430-objdump -D a.out | lessPassing the argument -D to objdump is similar to -S, but it dumps the disassembly for all sections rather than just the .text section as -S does. This is required because as mentioned above, the reset vector is part of its own section, not the .text. The output of this command will look like this:
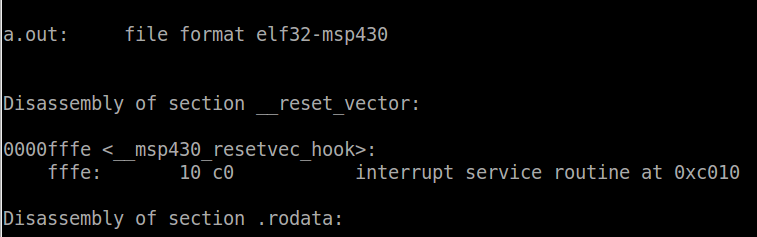
The first couple lines of code are all we are interested in. We can see that the first section in the output is the reset vector. In it there is only one label: ‘__msp430_resetvec_hook’. At this label there is 2 bytes of data allocated with the value of 0xc010 (keep in mind the endianess). Search for 0xc010, and you will see that this is the address of __start, the entry point. Therefore as expected, when sourced the reset vector shall cause the CPU to jump to the start-up code.
The watchdog timer
The watchdog is another very important interrupt. It is actually a whole module which is implemented as part of almost every MCU, SoC, etc… The purpose of the watchdog is to ensure that the software is running and had not stopped, crashed or otherwise been suspended. It is very rare that you find an embedded system without a watchdog. If implemented correctly in both hardware and software, the device should never stall indefinitely. Once enabling the watchdog, the software must pet it periodically with an interval less than its timeout. Failure to do so will result in the watchdog resetting the device. In the case of the MSP430, the watchdog interrupt is the same as the reset vector, so a watchdog interrupt will reset the device. Some devices have more complex watchdogs which generate an intermediate interrupt to allow the software to perform any logging or cleanup operations before resetting. The MSP430 watchdog module does not support this, but it has an additional interesting feature – it can be configured as a regular 16-bit timer. This could be useful if an additional timer if needed. We will be configuring the watchdog in watchdog mode because it is important to understand how to setup the module and how it should be maintained by the software. The watchdog is configured and monitored through the 16-bit register WDTCTL and two additional registers, interrupt enable 1 (IE1) and interrupt flag 1 (IFG1).

The field of these registers are defined as follows:
- WDTPW: watchdog password. A password is required in order to modify any of the watchdog configuration. This is to ensure that the change is actually desired and not a result of some rogue code or bad pointer. The password to access the register is 0x5A
- WDTHOLD: watchdog hold
- 0 – enable watchdog timer
- 1 – hold the watchdog timer
- WDTNMI: reset pin function select
- 0 – reset function
- 1 – NMI function
- WDTTMSEL: configure the mode of the watchdog
- 0 – watchdog mode
- 1 – interval timer mode
- WDTCNTCL: counter clear. Used by software to pet the watchdog
- 0 – no action
- 1 – clear counter
- WDTSSEL: watchdog clock source select. The watchdog clock can be sourced from either the SMCLK or the ACLK
- 0 – SMCLK
- 1 – ACLK
- WDTISx: watchdog interval select. Used to select the timeout of the watchdog
- 00 – 32768 clock cycles
- 01 – 8192 clock cycles
- 10 – 512 clock cycles
- 11 – 64 clcok cycles
- NMIIE: NMI interrupt enable
- 0 – NMI interrupt disabled
- 1 – NMI interrupt enabled
- WDTIE: watchdog interrupt enable only used in interval timer mode
- 0 – not enabled
- 1 – enabled
- NMIIFG: NMI interrupt flag
- 0 – no interrupt pending
- 1 – interrupt pending
- WDTIFG: watchdog interrupt flag, cleared by software and can be used to determine if a reset was caused by a watchdog
- 0 – no interrupt pending
- 1 – interrupt pending – watchdog timer expired
static void _watchdog_disable(void)
{
/* Hold the watchdog */
WDTCTL = WDTPW + WDTHOLD;
}
static void _watchdog_enable(void)
{
/* Read the watchdog interrupt flag */
if (IFG1 & WDTIFG) {
/* Clear if set */
IFG1 &= ~WDTIFG;
}
_watchdog_pet();
}
static void _watchdog_pet(void)
{
/**
* Enable the watchdog with following settings
* - sourced by ACLK
* - interval = 32768 / 12000 = 2.73s
*/
WDTCTL = WDTPW + WDTCNTCL;
}
The first function disables the watchdog exactly as we do currently
in our main function. The _disable_watchdog function should be called
right at the beginning of your code in order to avoid accidentally
generating a reset when modifying the configuration. You can go ahead
and replace the existing watchdog code in main with a call to this
function. In the enable function, the watchdog timer interrupt flag is
read and cleared if required. If the flag is set, some action could be
performed such as logging the number of watchdog resets but we have no
need at this time. Then _watchdog_pet is called. Petting the watchdog
will effectively enable it as well. Only two fields are set in the
WDTCTL register, the password field WTDPW and the clear counter bit
WDTCNTCL. The watchdog will be enabled since the WDTHOLD bit is cleared.
The timeout of the watchdog timer is determined by the clock source
select bit WDTSSEL and the interval select field WDTISx. This means the
watchdog timer will source its clock from ACLK and expire after 32768
clock cycles. In lesson 4 we
did not configure ACLK but now we must. ACLK should be configured to be
sourced from VLOCLK, which is approximately 12kHz. If we tried to
source it from MCLK or SMCLK, the timeout would be too short for the
delay required by the blinking LED. To configure ACLK, in main we must
add a new line under the clock configuration./* Configure the clock module - MCLK = 1MHz */ DCOCTL = 0; BCSCTL1 = CALBC1_1MHZ; DCOCTL = CALDCO_1MHZ; /* Configure ACLK to to be sourced from VLO = ~12KHz */ BCSCTL3 |= LFXT1S_2;Since the interval selector is set to 32768 clock cycles at 12kHz, the timeout of the watchdog will be 2.73s. Therefore the watchdog must be pet at least every 2.73s. Since our loop delay 500ms each iteration, we are within the requirements of the watchdog. Now lets see that the watchdog actually fires and resets the device. Call the watchdog enable function right after detecting the button press.
/* Wait forever until the button is pressed */ while (P1IN & 0x08); _watchdog_enable();Typically you would want to enable the watchdog as soon as possible, especially before any infinite loops. In case this I want you to control when the watchdog is enabled so that you can see when it resets. Compile the code and program it to the device. Set a breakpoint at the new function _watchdog_enable (use nm to find the address). Run the code and press the button. When it stops at the breakpoint run it and press the button again. The breakpoint will be hit again. This shows that the device is restarting. To verify that it is because of the watchdog, we can read the register IFG1 and see if WDTIFG is set. IFG1 is located at address 0x02 as indicated in both the datasheet and the family reference manual. Read this address using the md command. You should see the following:
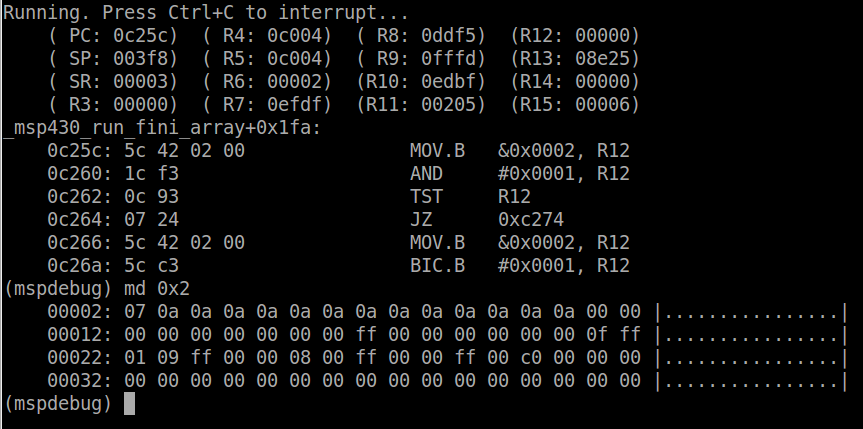
The value of the IE1 is 0x7, therefore the WDTIFG bit is set. It is important to note that the other bits which are set are defined by the device specific implementation which can be found in the datasheet. They are PORIFG (bit 2), the power on reset interrupt flag, and OFIFG (bit 1), the oscillator fault interrupt flag. These two bits are set because that is their default value after reset. Now we will pet the watchdog to prevent it from resetting the device. Call _watchdog_pet inside the while loop that toggles the LED.
while (1) {
_watchdog_pet();
/* Wait for LED_DELAY_CYCLES cycles */
__delay_cycles(LED_DELAY_CYCLES);
/* Toggle P1.0 output */
P1OUT ^= 0x01;
}
Compile the code and program the board. Press the button to enable
the watchdog and notice that now the board does not reset (note the
address of the breakpoint will need to be adjusted since you added new
code). And that’s basically how to pet a watchdog. As we add more code
to our project, we will see how the watchdog needs to be managed to
ensure that it only trips if there is a failure and not because the code
is waiting for some input.Interrupt handling on the MSP430
Now we will get into the details of interrupt handling on the MSP430. When an interrupt fires, a few things have to happen before entering the ISR:
- The instruction that is currently being executed must complete
- The PC (program counter) is pushed onto the stack
- The SR (status register) is pushed onto the stack
- The highest priority interrupt pending is selected
- The interrupt source flag is set
- The SR is clear (which disables interrupts)
- The address in the interrupt vector is loaded into the PC
The ISR has some responsibilities of its own before executing the application code. If written in C, this is taken care of by the compiler. In assembly it must be implemented manually. To see how this works, we are going to create an interrupt service routine in C to detect the button press. Unfortunately, there is no way defined by the C programming language on how to declare an interrupt handler, it is left up to the compiler. Therefore what you will learn is only applicable for gcc and may look slightly different on other compilers. To declare an ISR in gcc you must use the ‘attributes’ feature. Attributes provide additional functionality which are non-standard. When possible, using attributes should be avoided so that the code is compiler agnostic (read – portable from one compiler to another). There are some attributes which are common across compilers and it is often considered good practice to define them as macros in a separate header file (often name compiler.h) which uses hash defines to compile the macros relevant for that compiler. To declare the interrupt service routine, we first need to figure out which interrupt we are going to write an ISR for. On the MSP430, each IO port is assigned an interrupt. It is up to the software to determine which pin on the port was the source. So how so do we refer to this interrupt? Open the msp430g2553.h header file and search for ‘PORT1_VECTOR’. You will find the list of interrupt vectors for this device. The desired vector should be passed to the interrupt attribute. It tells the compiler in which section to place the address of your ISR. Therefore, our empty function declaration would look like this:
__attribute__((interrupt(PORT1_VECTOR))) void port1_isr(void) {;}
ISRs must have a return type of void and have no arguments. Lets see
what has been generated using the the objdump command from earlier to
disassemble the code.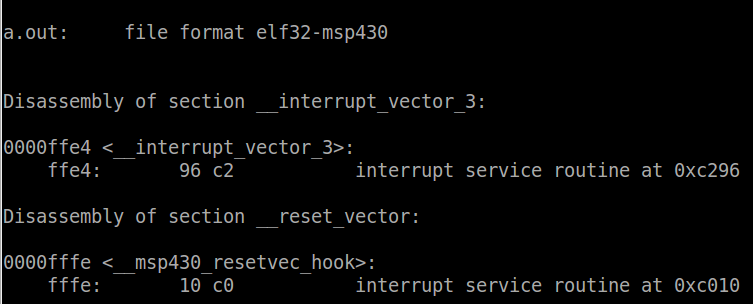
We can see that a new section has been added called __interrupt_vector_3. To understand this we need to go to the datasheet and find the address of the interrupt vector for port 1 (since our button is connected to P1.3). The vector is located at address 0xFFE4. In the linker script memory region table, this address is part of the region VECT3. In the sections table, we can see that the section __interrupt_vector_3 is loaded into region VECT3. This means that when passing vector 3 (which PORT1_VECTOR is defined as) to the interrupt attribute, the compiler will place the address of that function at 0xFFE4. From the objdump output, we can see the value at 0xFFE4 is 0xC278. Search in the rest of the file for this address and you will find that it is in fact our function port1_isr. Currently the function is empty, so lets go back and fill it in. In order to start or stop the the blinking LED using the push button, we will need some sort of signal between our main function and the ISR. We will use a simple variable which will be toggled by the ISR.
static volatile int _blink_enable = 0;For some of you volatile may be a new keyword that you have not used before. Volatile tells the compiler that the value of that variable may be changed at any time, without any nearby code changing it. This is the case for an ISR. The compiler cannot know when the ISR is going to fire, so every time the variable is accessed, it absolutely must read the value from memory. This is required because compilers are smart, and if they determine that nothing nearby can change the value, it may optimize the code in such a way that the value will not be read. In this case, that change will occur in the ISR so it must be read every single time. Next we have to introduce a few new registers, PxIES, PxIE and PxIFG (where ‘x’ is the port number). All three of these register follow the same bit-to-pin convention as the other port configuration registers we have previously discussed. The latter two are similar to IE1 and IE2, they are the port interrupt enable and port interrupt flag registers. PxIES is the interrupt edge select registers where a bit set to 0 signals an interrupt for a low-to-high transition (active-high) and a bit set to 1 signals an interrupt on a high-to-low transition (active-low). Now that we have covered how to configure the interrupts, let’s modify our code to use it. First, instead of waiting in a while loop to start the LED blinking, let the interrupt handler enable it, so remove the first while loop. The interrupt should be configured before the watchdog is enabled. Since the button is on P1.3 and it is pulled-up, we want to set the interrupt to occur on a high-to-low transition so bit 3 in PIES and P1IE should be set high. Finally, enable interrupts using the intrinsic function __enable_interrupt. In the while loop, modify the code to only blink the LED when _blink_enable is non-zero. Your code should look something like this:
/* Set P1.3 interrupt to active-low edge */
P1IES |= 0x08;
/* Enable interrupt on P1.3 */
P1IE |= 0x08;
/* Global interrupt enable */
__enable_interrupt();
_watchdog_enable();
/* Now start blinking */
while (1) {
_watchdog_pet();
if (_blink_enable != 0) {
/* Wait for LED_DELAY_CYCLES cycles */
__delay_cycles(LED_DELAY_CYCLES);
/* Toggle P1.0 output */
P1OUT ^= 0x01;
}
}
Now for the ISR. Since one interrupt is sourced for all the pins on
the port, the ISR should check that P1.3 was really the source of the
interrupt. To do so, we must read bit 3 of P1IFG and it is high, toggle
_blink_enable and then return.__attribute__((interrupt(PORT1_VECTOR))) void port1_isr(void)
{
if (P1IFG & 0x8) {
/* Clear the interrupt flag */
P1IFG &= ~0x8;
/* Toggle the blink enable */
_blink_enable ^= 1;
}
}
All of these changes are available in the latest lesson_6 tag on
github. Recompile the code and use objdump to inspect the ISR. The
address of the ISR can be found by looking at the contents of the
__interrupt_vector_3 section from objdump as we did for the reset
vector.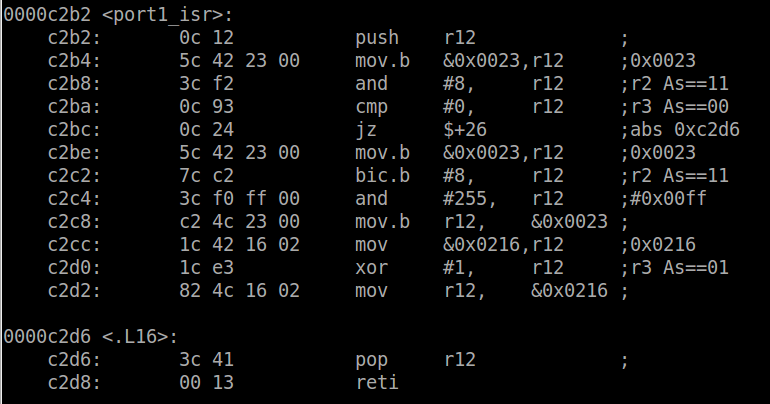
The first operation is to push R12 onto the stack. R12 is the register the compiler is going to use to toggle the variable _blink_enable. It must ensure that the previous value is stored because it may be used by the function which has been interrupted. If the ISR clobbers the register value, when the interrupted function continues execution, the register would have the wrong value. This applies to all registers and it is up to the compiler to determine which registers are used by the ISR and thus must be pushed on the stack. In this case only R12 is being used, so the most efficient implementation is to push only R12. Now that R12 is free to use, it can be used to check the value of P1IFG and ensure the flag is set. Then in order to acknowledge the interrupt so it doesn’t fire again, the flag must be cleared. The address of P1IFG (0x23) is loaded into R12 and bit 3 is cleared. Finally the address of our variable _blink_enable is loaded into the register and the value is XOR’d with 0x1. The stack is popped back into R12 to restore the initial value before returning. To return from an interrupt, the RETI pseudo-instruction is used. RETI, which stands from return from interrupt, tells the CPU to pop off the SR and PC values back into their respective registers. Now that all the registers are exactly as they were before the interrupt fired, the flow of execution continues on as if nothing happened. Now program the device and run the new code. The LED will begin blinking once the button is pressed, and pressing the button again will toggle the blinking on or off. Set a breakpoint at port1_isr. When the button is pressed the CPU will be stopped at the ISR. The stack pointer is set to ~0x3f4 (depending where exactly the code was interrupted) and dumping the memory at this location, we can see the result of entering the ISR.
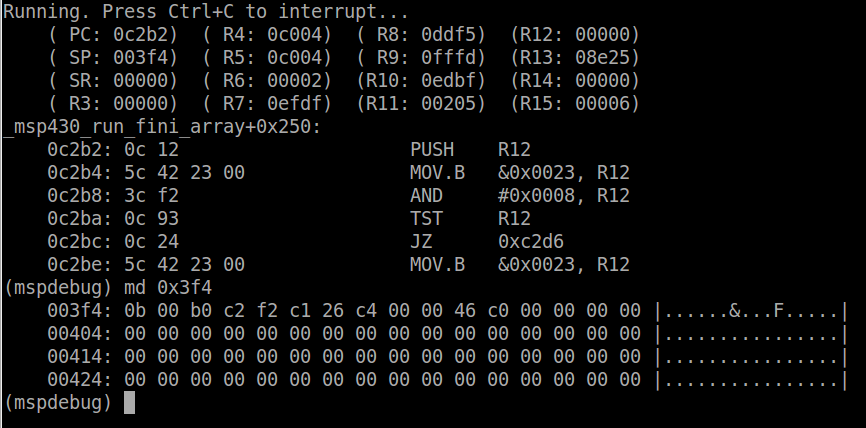
The first 2 bytes on the stack will be the SR. The value of the status register stored in the stack will be different from that currently dumped by mspdebug since it is cleared by the hardware. The next 2 bytes will be the PC, in this case 0xc2b0. Using objdump to view the code at this address, we can see that the CPU was interrupted right at the end of _watchdog_pet, which is called within the while loop, as expected. Your values may differ slightly depending where exactly the PC was when you pressed the button. What we really have experienced here is something commonly known as a context switch. It is the foundation of all software, not just embedded systems. Almost every operating system uses context switching to some extent, usually triggered by an interval timer firing an interrupt periodically. This is what allows you have to many threads and processes running on just one CPU. Its the illusion of parallel operation through the use of extremely fast context changes many times per second. The definition of the context is dependent on the architecture. In the case of the MSP430, it is all the main CPU registers we have discussed in the last lesson. When the ISR fires, we have to save all of these registers that could be modified so when the interrupt completes, the context can be restored. A context switch of a thread or task (synonymous terms) would have to save all the registers on its stack before restoring the registers for the task about to run. There is some really interesting stuff here, and this is only an introduction. We will not be creating a multi-threaded system since that is way beyond the scope of this course, but interrupts are a form of context switch so it is important to understand how powerful and important they really are in embedded systems.
Lesson 7: Upgrading the Build System
In this lesson we are going to go on a bit of a tangent and take
care of some housekeeping duties to accommodate our growing code base.
Until now, we have been writing all the code in a single file, and
compiling by invoking gcc on the command line. Clearly neither of the
are scalable nor feasible solutions for for a full embedded development
project. We need to separate our code into logical modules, create
header files will APIs to interface with them and introduce a new tool
that will help us maintain our build system and environment. This tool
is called ‘make’. Make is GNU utility which is the de-facto standard in
the open source community for managing build environments. Most IDEs
(notably Eclipse and its derivatives) use make or a form a make to
manage the build. To the user its looks like a series of files in a
folder which get compiled when you press build, but under the hood a
series of scripts are being invoked by make which does all the real
work. Make does several things which we will look at in this tutorial.
First, it allows you to defined compiles rules, so instead of invoking
gcc from the command line manually, you can script it so it passes in
the files and the compiler options automatically. It allows you to
better organize your code into directories, for example, one directory
for source files, one for header files and another one for the build
output. And finally, it can be used to track dependencies between files –
in other words, not all files need to be recompiled every time and this
tool will determine which files need to be compiled with the help of
some rules we will add to the script. Make is an extremely powerful
tool, so we will just scratch the surface in this tutorial to get us
started. But before we jump into make, we must start by cleaning up our
code.
Reorganizing the code
As you know, all the code we have written is currently in one file, main.c. For such a small project, this is possibly acceptable. However for any real project functions should be divided into modules with well defined APIs in header files. Also, we do not want to have a flat directory structure so we must organize the code into directories. The directory structure we will start with is going to be simple yet expandable. We will create three directories:
Verifying the calibration data is another example of code that the main application is not required to know about. In fact, it is safe to say that the only piece of code which relies on this check is setting up the clock module. Speaking of which, does the application need to know how the clocks are set up? Not really. Maybe it will need to know the speed of the clocks in order to configure some peripherals, but not the actual implementation of the DCO configuration. Those are board specific, not application specific.
Finally the pin configuration. The application does rely on the pins being configured correctly in order to read and write to them, but the pin muxing needs to be done only once and again, depends on the board. The application could choose to use them or not. Therefore the pin muxing could be considered part of the board initialization. Hopefully you see where we are going with this. We are trying to categorize certain functionalities so that we can create reusable modules. It isn’t always so straight cut and clear, and often takes experience and many iterations to figure out what works, but when done properly, the code will be much more maintainable and portable. In our case we have defined the following modules:
So lets take a look at what new header files and APIs we will have to introduce to modularize our code as described above. Based on the code we have written already, we can separate the APIs defined into new source and header files. The first API to look at is the watchdog. There are three watchdog functions in our code at this point. Since they will no longer be static, we can remove their static declarations from main.c and move them into a new file called watchdog.h which will be located in the include directory. We will also remove the leading underscore to indicate that they are public functions. As a note for good coding practice, it is easiest for someone reading your code when the prefix of your functions match the filename of the header containing them, for example, watchdog_enable would be in watchdog.h. Yes the IDEs can find the function for you and you don’t have to search for anything, but there is no reason to mismatch naming conventions. So now, our watchdog.h file will look like this:
Now, we need to cut the function definitions out from main.c and move them to a new file called watchdog.c under the src/ directory. Remember to change the functions to match those in the header file. We will also need need to include watchdog.h as well as msp430.h to access the register definitions.

Back to the code, we also want to separate the configuration data (TLV) verification. Again, a new header file should be created in the include/ directory called tlv.h. We remove the declaration of the _verify_cal_data function from main.c, move it to tlv.h, and rename it to tlv_verify.
Makefiles
Now that the code is nicely refactored, on to the basics of make. The script invoked by make is called a makefile. To create a makefile, you simply create a new text file which is named ‘makefile’ (or ‘Makefile’). Before we begin writing the makefile, lets discuss the basic syntax. For more information you can always reference the GNU make documentation found here.
The basic building block of makefiles are rules. Rules define how an output is generated given a certain set of prerequisites. The output is called a target and make automatically determines if the prerequisites for a given target have been satisfied. If any of the prerequisites are newer than the target, then the instructions – called a recipe – must be executed. The syntax of a rule is as follows:
As you can imagine, in a project which has many source files and many dependences, creating rules or each one manually would be tedious and most certainly lead to errors. For this reason, the target and prerequisites can be defined using patterns. A common example would be to take our rule from above, and apply it to all C files.
Makefiles have variables similar to any other programming or scripting language. Variables in make are always interpreted as strings and are case-sensitive. The simplest way to assign a variable is by using the assignment operator ‘=’, for example
The value assigned to a variable need not be a constant string either. One of the most powerful uses of variables is that they can be interpreted as shell commands or makefile functions. These variables are often called macros. By using the assignment operator, it tells make that the variable should be expanded every time it is used. For example, say we want to find all the C source files in the current directory and add assign them to a variable.
The last type of assignment operator is the conditional variable assignment, denoted by ‘?=’. This means that the variable will only be assigned a value if it is currently not defined. This can be useful when a variable may be exported in the environment of the shell and the makefile needs that variable but should not overwrite it if it defined. This means that if you have exported a variable from the shell (as we did in lesson 2), that variable is now in the environment and make will read the environment and have access to those variables when executing the makefile. One example where this would be used is to define the path to the toolchain. I like to install all my toolchains to the /opt directory, but some people like to install them to the /home directory. To account for this, I can assign the variable as follows:
Rules can be invoked automatically by specifying macros that substitute the prerequisites for the target. One of the most common examples of this is using a macro to invoke the compile rule. To do this, we can use a substitution command which will convert all .c files in SRCS to .o files, and store them in a new variable OBJS.
Rules and variables are the foundations of makefiles. There is much more but this short introduction is enough to get us started. As we write our makefile, you will be introduced to a few new concepts.
Writing our Makefile
We made a whole bunch of changes to our code and now compiling from the command line using gcc directly is not really feasible. We need to write our first makefile using these principles from earlier. If you have not yet downloaded the tagged code for this tutorial, now would be the time. We are going to go through the new makefile line-by-line to understand exactly how to write one. The makefile is typically placed in the project root directory, so open it up with a text editor. The first line starts with a hash (#), which is the symbol used to denote comments in makefiles. Next we start defining the variables, starting with TOOLCHAIN_ROOT.
Next the directories are defined.
Next the source files are saved to the SRCS variable.
Next the output file, ELF is assigned.
In C, there is nothing stopping a source file from containing a global variable foo, and then using the same name foo, for an argument passed into one of the functions. In the function, the compiler must decide which foo to use, which is not right. The compiler cannot possibly know which variable you are referring to, so enabling Wshadow will throw an error if shadow variables are encountered, rather than choosing one.
Finally, -std and -Wpedantic tell the compiler what standard to use, and what types of extensions are acceptable. The gnu90 standard is the GNU version of the ISO C90 standard with GNU extensions and implicit functions enabled. I would have preferred to use C90 (no GNU extensions – also called ansi) but the msp430.h header and intrinsic functions do not play nice with this. Wpedantic tells the compiler to accept only strict ISO C conformance and not accept non-standard extensions other than those that are defined with prepended and appended with double underscores (think __attributes__). So together these two parameters mean no C++ style comment (“//”), variables must be defined at the beginning of the scope (i.e. right after an opening brace) amongst other things.
The -MMD flag tells the compiler to output make-compatible dependency data. Instead of writing the required header files explicitly as we did earlier, gcc can automatically determine the prerequisites and store them in a dependency file. When we compile the code, make will check not only the status of the file, but also of all the prerequisites stored in its respective dependency file. If you look at a dependency file (which have the extension .d as we will see later), it is really just a list of the header files included in the source file. Finally, the -I argument tells gcc in what directory(ies) to search for include files. In our case this is the variable INC_DIR which resolves to the the include/ directory.
Under the linker flags variable LDFLAGs, we only have to pass the device type argument. The default linker arguments are sufficient at this time.
Finally the rules. Rules typically result in the output of a file (the target), however sometimes we need rules to do other things. These targets are called PHONY, and should be declared as such. The target all is an example of a PHONY.
The last rule is the clean rule, which is another PHONY target. This rule simply deletes the entire build directory, so there are no objects or dependencies stored. If you ever want to do a full rebuild, you would perform a make clean and then a make all, or in shorthand on the command line:

From the output you can see exactly what we have discussed. Each source file is compiled using the arguments defined by CFLAGS into an object file and stored under build/obj. Then, all these object files are linked together to create the final executable app.out. This is the file that is loaded to the MSP430. The functionality is exactly the same as the previous lesson. Some homework for those of you who are interested: create a new rule in the makefile called ‘download’ which will flash the output to the MSP430 automatically using mspdebug. The answer will be available in the next lesson.
Reorganizing the code
As you know, all the code we have written is currently in one file, main.c. For such a small project, this is possibly acceptable. However for any real project functions should be divided into modules with well defined APIs in header files. Also, we do not want to have a flat directory structure so we must organize the code into directories. The directory structure we will start with is going to be simple yet expandable. We will create three directories:
- src: where all the source files go
- include: where all the header files go
- build: where all the output files go
cd ~/msp430_launchpad mkdir src mkdir includeThe build directory will actually be generated by the build automatically, so we don’t have to create it manually. You rarely check in the built objects or binary files into the SCM (git) so the build directory should be added to the .gitignore file. Open the .gitignore file (a period in front of a filename means it is hidden in Linux – you can see it with the command ls -al) and on the next line after ‘*.out’ add ‘build/’, save and close. You will not see the new directories under git status until there is a file in them as git ignores empty directories. Move main.c into the src/ directory.
mv main.c srcOpen main.c in your editor and lets take a look at how we can separate this file into modules. The main function is like your application, think of it as your project specific code. Start by asking, what does this file need to do? What tasks does it perform? Let break this down, the main program needs:
- enable / disable / pet the watchdog
- verify the calibration data
- set up the clocks
- initialize the pins
- perform the infinite loop which is the body of the application
Verifying the calibration data is another example of code that the main application is not required to know about. In fact, it is safe to say that the only piece of code which relies on this check is setting up the clock module. Speaking of which, does the application need to know how the clocks are set up? Not really. Maybe it will need to know the speed of the clocks in order to configure some peripherals, but not the actual implementation of the DCO configuration. Those are board specific, not application specific.
Finally the pin configuration. The application does rely on the pins being configured correctly in order to read and write to them, but the pin muxing needs to be done only once and again, depends on the board. The application could choose to use them or not. Therefore the pin muxing could be considered part of the board initialization. Hopefully you see where we are going with this. We are trying to categorize certain functionalities so that we can create reusable modules. It isn’t always so straight cut and clear, and often takes experience and many iterations to figure out what works, but when done properly, the code will be much more maintainable and portable. In our case we have defined the following modules:
- board initialization
- clock module initialization
- pin muxing / configuration
- watchdog
- TLV configuration data
- application
So lets take a look at what new header files and APIs we will have to introduce to modularize our code as described above. Based on the code we have written already, we can separate the APIs defined into new source and header files. The first API to look at is the watchdog. There are three watchdog functions in our code at this point. Since they will no longer be static, we can remove their static declarations from main.c and move them into a new file called watchdog.h which will be located in the include directory. We will also remove the leading underscore to indicate that they are public functions. As a note for good coding practice, it is easiest for someone reading your code when the prefix of your functions match the filename of the header containing them, for example, watchdog_enable would be in watchdog.h. Yes the IDEs can find the function for you and you don’t have to search for anything, but there is no reason to mismatch naming conventions. So now, our watchdog.h file will look like this:
#ifndef __WATCHDOG_H__ #define __WATCHDOG_H__ /** * brief Disable the watchdog timer module */ void watchdog_disable(void); /** * brief Enable the watchdog timer module * The watchdog timeout is set to an interval of 32768 cycles */ void watchdog_enable(void); /** * brief Pet the watchdog */ void watchdog_pet(void); #endif /* __WATCHDOG_H__ */Notice how when we create public functions that are defined in header files we will always document them. This is considered good practice and should be done consistently. These are extremely simple functions so not much documentation is required. Obviously a more complex function with parameters and a return code will have more information, but try to keep it as simple as possible for the reader without revealing too much about the internal workings of the function. This also leads to the concept of not changing your APIs. Changing the API should be avoided, as well as changing any behaviour with the external world. The expected behaviour should be well defined, although the implementation can be changed as required. Therefore your comments will have minimal changes as well.
Now, we need to cut the function definitions out from main.c and move them to a new file called watchdog.c under the src/ directory. Remember to change the functions to match those in the header file. We will also need need to include watchdog.h as well as msp430.h to access the register definitions.
#include "watchdog.h"
#include <msp430.h>;
/**
* brief Disable the watchdog timer module
*/
void watchdog_disable(void)
{
/* Hold the watchdog */
WDTCTL = WDTPW + WDTHOLD;
}
/**
* brief Enable the watchdog timer module
* The watchdog timeout is set to an interval of 32768 cycles
*/
void watchdog_enable(void)
{
/* Read the watchdog interrupt flag */
if (IFG1 & WDTIFG) {
/* Clear if set */
IFG1 &= ~WDTIFG;
}
watchdog_pet();
}
/**
* brief Pet the watchdog
*/
void watchdog_pet(void)
{
/**
* Enable the watchdog with following settings
* - sourced by ACLK
* - interval = 32786 / 12000 = 2.73s
*/
WDTCTL = WDTPW + (WDTSSEL | WDTCNTCL);
}
Another very important concept is knowing when and where to include
header files. Not knowing this can result in extremely poorly written
and impossible to maintain code. The rules for this are very simple:- A public header file should include all header files required to use it. This means, if you have defined a structure in header file foo.h and it is passed as an argument for one of the functions bar.h, bar.h must include foo.h. You don’t want the caller of this API to have to know what other include files to include. The reason for this being, if the caller must include two header files to use one API, the order matters. In this case, foo.h must be included before bar.h. If it just so happens the caller has already included foo.h for some other reason, they may not even notice it is required. This is a maintenance nightmare for anyone using your code.
- A public header file should include only what is required. Those giant monolithic header files are impossible to maintain. Users of your APIs shouldn’t have to care about your implementation. Don’t include files or types that make this information public because when you change it, the calling code will have to be updated as well. Include header files and private types required in the implementation only in the source file.This makes the code portable and modular. Updating and improving your implementation is great, forcing to callers to update their code because of changing in some structure, not so much.
- The last point is no never include header files recursively, meaning foo.h includes bar.h and vice versa. This will again result in a maintenance nightmare.
Back to the code, we also want to separate the configuration data (TLV) verification. Again, a new header file should be created in the include/ directory called tlv.h. We remove the declaration of the _verify_cal_data function from main.c, move it to tlv.h, and rename it to tlv_verify.
#ifndef __TLV_H__ #define __TLV_H__ /** * brief Verify the TLV data in flash * return 0 if TLV data is valid, -1 otherwise */ int tlv_verify(void); #endif /* __TLV_H__ */Now create the matching source file tlv.c in the src/ directory and move the implementation from main.c into this file. We will also need to move the helper function _calculate_checsum into our new file. It will remain static as it is private to this file.
#include "tlv.h"
#include <msp430.h>
#include <stdint.h>
#include <stddef.h>
static uint16_t _calculate_checksum(uint16_t *address, size_t len);
/**
* brief Verify the TLV data in flash
* return 0 if TLV data is valid, -1 otherwise
*/
int tlv_verify(void)
{
return (TLV_CHECKSUM + _calculate_checksum((uint16_t *) 0x10c2, 62));
}
static uint16_t _calculate_checksum(uint16_t *data, size_t len)
{
uint16_t crc = 0;
len = len / 2;
while (len-- > 0) {
crc ^= *(data++);
}
return crc;
}
The last header file will be board.h, which will require a new API to
initialize and configure the device for the board specific application.
Our prototype will look like this:#ifndef __BOARD_H__ #define __BOARD_H__ /** * brief Initialize all board dependant functionality * return 0 on success, -1 otherwise */ int board_init(void); #endif /* __BOARD_H__ */Now we can create board.c in the src/ directory, and implement the API. We will cut everything from the beginning of main until watchdog_enable (inclusive) and paste it into our new function. Now we need to clean up the body of this function to use our new APIs. We need to include board watchdog.h and tlv.h as well as fix up any of the function calls to reflect our refactoring effort.
#include "board.h"
#include "watchdog.h"
#include "tlv.h"
#include <msp430.h>
/**
* brief Initialize all board dependant functionality
* return 0 on success, -1 otherwise
*/
int board_init(void)
{
watchdog_disable();
if (tlv_verify() != 0) {
/* Calibration data is corrupted...hang */
while(1);
}
/* Configure the clock module - MCLK = 1MHz */
DCOCTL = 0;
BCSCTL1 = CALBC1_1MHZ;
DCOCTL = CALDCO_1MHZ;
/* Configure ACLK to to be sourced from VLO = ~12KHz */
BCSCTL3 |= LFXT1S_2;
/* Configure P1.0 as digital output */
P1SEL &= ~0x01;
P1DIR |= 0x01;
/* Set P1.0 output high */
P1OUT |= 0x01;
/* Configure P1.3 to digital input */
P1SEL &= ~0x08;
P1SEL2 &= ~0x08;
P1DIR &= ~0x08;
/* Pull-up required for rev 1.5 Launchpad */
P1REN |= 0x08;
P1OUT |= 0x08;
/* Set P1.3 interrupt to active-low edge */
P1IES |= 0x08;
/* Enable interrupt on P1.3 */
P1IE |= 0x08;
/* Global interrupt enable */
__enable_interrupt();
watchdog_enable();
return 0;
}
Finally, we need to clean up our main function to call board_init and then update watchdog_pet API.int main(int argc, char *argv[])
{
(void) argc;
(void) argv;
if (board_init() == 0) {
/* Start blinking the LED */
while (1) {
watchdog_pet();
if (_blink_enable != 0) {
/* Wait for LED_DELAY_CYCLES cycles */
__delay_cycles(LED_DELAY_CYCLES);
/* Toggle P1.0 output */
P1OUT ^= 0x01;
}
}
}
return 0;
}
Now isn’t that much cleaner and easier to read? Is it perfect, no?
But is it better than before, definately. The idea behind refactoring in
embedded systems is to make the application level code as agnostic as
possible to the actual device it is running on. So if we were going to
take this code and run it on a Atmel or PIC, all we should have
to change is the implementation of the hardware specific APIs.Obviously
in our main this is not the case yet. We have register access to GPIO
pins and an ISR, both of which are not portable code. We could create a
GPIO API and implement all GPIO accesses there, but for now there is no
need. Similarly, we could make an interrupt API which allows the caller
to attach an ISR function to any ISR, as well as enable or disable them.
This type of abstraction is called hardware abstraction and the code /
APIs that implement it are called the hardware abstraction layer (HAL).Makefiles
Now that the code is nicely refactored, on to the basics of make. The script invoked by make is called a makefile. To create a makefile, you simply create a new text file which is named ‘makefile’ (or ‘Makefile’). Before we begin writing the makefile, lets discuss the basic syntax. For more information you can always reference the GNU make documentation found here.
The basic building block of makefiles are rules. Rules define how an output is generated given a certain set of prerequisites. The output is called a target and make automatically determines if the prerequisites for a given target have been satisfied. If any of the prerequisites are newer than the target, then the instructions – called a recipe – must be executed. The syntax of a rule is as follows:
<target> : <prerequisites>
<recipe>
Note that in makefiles whitespace does matter. The recipe must be
tab-indented from the target line. Most editors will automatically take
care of this for you, but if your editor replaces tabs with spaces for
makefiles, make will reject the syntax and throw an error. There should
be only one target defined per rule, but any number of prerequisites.
For example, say we want to compile main.c to output main.o, the rule
might look like this:main.o: main.c
<recipe>
If make is invoked and the target main.o is newer than main.c, no
action is required. Otherwise, the recipe shall be invoked. What if
main.c includes a header files called config.h, how should this rule
look then?main.o: main.c main.h
<recipe>
It is important to include all the dependencies of the file as
prerequisites, otherwise make will not be able to do its job correctly.
If the header file is not included in the list of prerequisites, it can
cause the build not to function as expected, and then ‘mysteriously’
start functioning only once main.c is actually changed. This becomes
even more important when multiple source files reference the same
header. If only one of the objects is rebuilt as a result of a change in
the header, the executable may have mismatched data types, enumerations
etc… It is very important to have a robust build system because there
is nothing more frustrating than trying to debug by making tons of
changes that seem to have no effect only to find out that it was the
fault of your build system.As you can imagine, in a project which has many source files and many dependences, creating rules or each one manually would be tedious and most certainly lead to errors. For this reason, the target and prerequisites can be defined using patterns. A common example would be to take our rule from above, and apply it to all C files.
%.o: %.c
<recipe>
This rule means that for each C file, create an object file (or file
ending in .o to be specific) of the equivalent name using the recipe.
Here we do not include the header file because it would be nonsensical
for all the headers to be included as prerequisites for every source
file. Instead, there is the concept of creating dependencies which we
look at later.Makefiles have variables similar to any other programming or scripting language. Variables in make are always interpreted as strings and are case-sensitive. The simplest way to assign a variable is by using the assignment operator ‘=’, for example
VARIABLE = valueNote, variables are usually defined using capital letters as it helps differentiate from any command line functions, arguments or filenames. Also notice how although the variable is a string, the value is not in quotes. You do not have to put the value in quotes in makefiles so long as there are no whitespaces. If there are you must use double quotes otherwise the value will be interpreted incorrectly. To reference the variable in the makefile, it must be preceded with a dollar sign ($) and enclosed in brackets, for example
<target> : $(VARIABLE)
@echo $(VARIABLE)
Would print out the value assigned to the variable. Putting the ‘@’
sign in front of the echo command tells make not to print out the
command it is executing, only the output of the command. You may be
wondering how it is that the shell command ‘echo’ can be invoked
directly from make. Typically invoking a shell command requires using a
special syntax but make has some implicit rules for command line
utilities. ‘CC’ is another example of an implicit rule whose default
value is ‘cc’ which is gcc. However, this is the host gcc, not our
MSP430 cross compiler so this variable will have to be overloaded.The value assigned to a variable need not be a constant string either. One of the most powerful uses of variables is that they can be interpreted as shell commands or makefile functions. These variables are often called macros. By using the assignment operator, it tells make that the variable should be expanded every time it is used. For example, say we want to find all the C source files in the current directory and add assign them to a variable.
SRCS=$(wildcard *.c)Here ‘wildcard’ is a make function which searches the current directory for anything that matches the pattern *.c. When we have defined a macro like this where SRCS may be used in more than one place in the makefile, it is probably ideal not to re-evaluate the expression every time it is referenced. To do so, we must use another type of assignment operator, the simply expanded assignment operator ‘:=’.
SRCS:=$(wildcard *.c)For most assignments, it is recommended to use the simply expanded variables unless you know that the macro should be expanded each time it is referenced.
The last type of assignment operator is the conditional variable assignment, denoted by ‘?=’. This means that the variable will only be assigned a value if it is currently not defined. This can be useful when a variable may be exported in the environment of the shell and the makefile needs that variable but should not overwrite it if it defined. This means that if you have exported a variable from the shell (as we did in lesson 2), that variable is now in the environment and make will read the environment and have access to those variables when executing the makefile. One example where this would be used is to define the path to the toolchain. I like to install all my toolchains to the /opt directory, but some people like to install them to the /home directory. To account for this, I can assign the variable as follows:
TOOLCHAIN_ROOT?=~/msp430-toolchainThat makes all the people who like the toolchain in their home directory happy. But what about me with my toolchain under /opt? I simply add an environment variable to my system (for help – see section 4) which is equivalent to a persistent version of the export command. Whenever I compile, make will see that TOOLCHAIN_ROOT is defined in my environment and used it as is.
Rules can be invoked automatically by specifying macros that substitute the prerequisites for the target. One of the most common examples of this is using a macro to invoke the compile rule. To do this, we can use a substitution command which will convert all .c files in SRCS to .o files, and store them in a new variable OBJS.
OBJS:=$(SRCS:.c=.o)This is a shorthand for make’s pattern substitution (patsubst) command. If there is a rule defined that matches this substitution, make will invoke it automatically. The recipe is invoked once for each file, so for every source file the compile recipe will be invoked and object file will be generated with the extension .o. Pattern substitution, as well as the many other string substitution functions in make, can also be used to strip paths, add prefixed or suffixes, filter, sort and more. They may or may not invoke rules depending on the content of your makefile.
Rules and variables are the foundations of makefiles. There is much more but this short introduction is enough to get us started. As we write our makefile, you will be introduced to a few new concepts.
Writing our Makefile
We made a whole bunch of changes to our code and now compiling from the command line using gcc directly is not really feasible. We need to write our first makefile using these principles from earlier. If you have not yet downloaded the tagged code for this tutorial, now would be the time. We are going to go through the new makefile line-by-line to understand exactly how to write one. The makefile is typically placed in the project root directory, so open it up with a text editor. The first line starts with a hash (#), which is the symbol used to denote comments in makefiles. Next we start defining the variables, starting with TOOLCHAIN_ROOT.
TOOLCHAIN_ROOT?=/opt/msp430-toolchainUsing the conditional variable assignment, it is assigned the directory of the toolchain. It is best not to end paths with a slash ‘/’ even it is a directory, because when you go to use the variable, you will put another slash and end up with double slashes everywhere. It won’t break anything usually, but its just cosmetic. Next we want to create a variable for the compiler. The variable CC is implicit in make and defaults to the host compiler. Since we need the MSP430 cross-compiler, the variable can be reassigned to the executable.
CC:=$(TOOLCHAIN_ROOT)/bin/msp430-gccOften the other executable inside the toolchain’s bin directory are defined by the makefile as well if they are required. For example, if we were to use the standalone linker ld, we would create a new variable LD and point it to the linker executable. The list of implicit variables can be found in the GNU make documentation.
Next the directories are defined.
BUILD_DIR=build OBJ_DIR=$(BUILD_DIR)/obj BIN_DIR=$(BUILD_DIR)/bin SRC_DIR=src INC_DIR=includeWe have already create two directories, src and include, so SRC_DIR and INC_DIR point to those respectively. The build directory is where all the object files will go and will be created by the build itself. There will be two subdirectories, obj and bin. The obj directory is where the individually compiled object files will go, while he bin directory is for the final executable output. Once the directories are defined, the following commands are executed:
ifneq ($(BUILD_DIR),) $(shell [ -d $(BUILD_DIR) ] || mkdir -p $(BUILD_DIR)) $(shell [ -d $(OBJ_DIR) ] || mkdir -p $(OBJ_DIR)) $(shell [ -d $(BIN_DIR) ] || mkdir -p $(BIN_DIR)) endifThe ifneq directive is similar to C, but since everything is a string, it compares BUILD_DIR to nothing which is the equivalent to an empty string. Then shell commands are executed to check if the directory exists and if not it will be created. The square brackets are the shell equivalent of a conditional ‘if’ statement and ‘-d’ checks for a directory with the name of the string following. Similar to C, or’ing conditions is represented by ‘||’. If the directory directory exists, the statement is true, so rest will not be executed. Otherwise, the mkdir command will be invoked and the directory will be created. The shell command is repeated for each subdirectory of build.
Next the source files are saved to the SRCS variable.
SRCS:=$(wildcard $(SRC_DIR)/*.c)Using the wildcard functions, make will search all of SRC_DIR for any files that match the pattern *.c, which will resolve all of our C source files. Next comes the object files. As we discussed earlier, path substitution can be used to invoke a rule. The assignment
OBJS:=$(patsubst %.c,$(OBJ_DIR)/%.o,$(notdir $(SRCS)))is the long hand version of what we discussed above but with some differences. First, the patsubst command is written explicitly. Then the object file name must be prepended with the OBJ_DIR path. This tells make that for a given source file, the respective object file should be generated under build/obj. We must strip the path of the source files using the notdir function. Therefore, src/main.c would become main.c. We need to do this because we do not want prepend the OBJ_DIR to the full source file path, i.e. build/src/main.c. Some build systems do this, and it is fine, but I prefer to have all the object files in one directory. One caveat of putting all the object files in one directory is that if two files have the same name, the object file will get overwritten by the last file to compile. This is not such a bad thing however, because it would be confusing to have two files with the same name in one project. The rule that this substitution invokes is defined later in the makefile.
Next the output file, ELF is assigned.
ELF:=$(BIN_DIR)/app.outThis is just a simple way of defining the name of location of the final executable output file. We place it in the bin directory (although it’s technically not a binary). This file is the linked output of all the individual object files that exist in build/obj. To understand how this works we need to look at the next two variables, CFLAGS and LDFLAGS. These two variables are common practice and represent the compile flags and linker flags respectively. Lets take a look at the compiler flags.
CFLAGS:= -mmcu=msp430g2553 -c -Wall -Werror -Wextra -Wshadow -std=gnu90 -Wpedantic -MMD -I$(INC_DIR)The first flag in here is one we have been using all along to tell the compiler which device we are compiling for. The ‘-c’ tells gcc to stop at the compilation step and therefore the linker will not be invoked. The output will still be an object file containing the machine code, but the addresses to external symbols (symbols defined in other objects files) will not yet be resolved. Therefore you cannot load and execute this object file, as it is only a part of the executable. The -Wall -Werror -Wextra -Wshadow -std=gnu90 -Wpedantic compiler flags tell the compiler to enable certain warnings and errors to help make the code robust. Enabling all these flags makes the compiler very sensitive to ‘lazy’ coding. Wall for example turns all the standard compiler warnings, while Wextra turns on some more strict ones. You can find out more about the exact checkers that are being enabled by looking at the gcc man page. Werror turns all warnings into errors. For non-syntactical errors, the compiler may complain using warnings rather than errors, which means the output will still be generated but with potential issues. Often leaving these warnings uncorrected can result in undesired behaviour and are difficult to track down because the warnings are only issued when that specific file is compiled. Once the file is compiled, gcc will no longer complain and its easy to forget. By forcing all warnings to be errors, you must fix everything up front.
In C, there is nothing stopping a source file from containing a global variable foo, and then using the same name foo, for an argument passed into one of the functions. In the function, the compiler must decide which foo to use, which is not right. The compiler cannot possibly know which variable you are referring to, so enabling Wshadow will throw an error if shadow variables are encountered, rather than choosing one.
Finally, -std and -Wpedantic tell the compiler what standard to use, and what types of extensions are acceptable. The gnu90 standard is the GNU version of the ISO C90 standard with GNU extensions and implicit functions enabled. I would have preferred to use C90 (no GNU extensions – also called ansi) but the msp430.h header and intrinsic functions do not play nice with this. Wpedantic tells the compiler to accept only strict ISO C conformance and not accept non-standard extensions other than those that are defined with prepended and appended with double underscores (think __attributes__). So together these two parameters mean no C++ style comment (“//”), variables must be defined at the beginning of the scope (i.e. right after an opening brace) amongst other things.
The -MMD flag tells the compiler to output make-compatible dependency data. Instead of writing the required header files explicitly as we did earlier, gcc can automatically determine the prerequisites and store them in a dependency file. When we compile the code, make will check not only the status of the file, but also of all the prerequisites stored in its respective dependency file. If you look at a dependency file (which have the extension .d as we will see later), it is really just a list of the header files included in the source file. Finally, the -I argument tells gcc in what directory(ies) to search for include files. In our case this is the variable INC_DIR which resolves to the the include/ directory.
Under the linker flags variable LDFLAGs, we only have to pass the device type argument. The default linker arguments are sufficient at this time.
LDFLAGS:= -mmcu=msp430g2553Next there is the DEPS variable, which stands for dependencies.
DEPS:=$(OBJS:.o=.d)As mentioned earlier, the dependency rule takes the object file and creates a matching dependency file under the build/obj directory. This macro is the same as the shorthand version of patsubst which we saw earlier for OBJS. The rule to generate the dependency file is implicit.
Finally the rules. Rules typically result in the output of a file (the target), however sometimes we need rules to do other things. These targets are called PHONY, and should be declared as such. The target all is an example of a PHONY.
.PHONY: all
all: $(ELF)
We don’t want a file named ‘all’ to be generated, but it is still a
target which should be executed. The target all means perform the full
build. The prerequisite of the target all is the the target ELF, which
is the output file. This means in order for ‘make all’ to succeed, the
output binary must have been generated successfully and be up to date.
The ELF target has its own rule below:$(ELF) : $(OBJS)
$(CC) $(LDFLAGS) $^ -o $@
It’s prerequisites are all the object files that have been created
and stored in the variable OBJS. Now the recipe for this rule brings us
back to the linker issue. The compiled object files must be linked into
the final executable ELF so that all addresses are resolved. To do this
we can use gcc (CC) which will automatically invoke the linker with the
correct default arguments. All we have to do is pass the LDFLAGS to CC,
and tell it what the input files are and what the output should be. The
recipe for the link command introduced a new concept called automatic
variables. Automatic variables can be used to represent the components
of a rule. $@ refers to the target, while $^ refers to all the
prerequisites. It is convenient way to write generic rules without
explicitly listing the target and prerequisites. The equivalent for this
recipe without using the automatic variables would be$(ELF) : $(OBJS)
$(CC) $(LDFLAGS) $(OBJS) -o $(ELF)
In order to meet the prerequisites of OBJS for the ELF target, the
individual sources must be compiled. This is where the path substitution
comes in. When make tries to resolve the prerequisite, it will see the
path substitution in the assignment of the OBJ variable and invoke the
final rule:$(OBJ_DIR)/%.o : $(SRC_DIR)/%.c
$(CC) $(CFLAGS) $< -o $@
This rule takes all the source files stored in the SRCS variable and
compiles them with the CFLAGS arguments. In this case, the rule is
invoked for each file, so the target is each object file and the
prerequisite is the matching source file. This leads us to another
automatic variable $< which is the equivalent to taking the first
prerequisite, rather than all of them as $^ does. The rule must match
our path substitution, so thats why the target must be prepended with
the OBJ_DIR variable and the prerequisites with the SRC_DIR variable.The last rule is the clean rule, which is another PHONY target. This rule simply deletes the entire build directory, so there are no objects or dependencies stored. If you ever want to do a full rebuild, you would perform a make clean and then a make all, or in shorthand on the command line:
make clean && make allThe last line in the makefiles is the include directive for the dependency files. In make the include directive can be used to include other files as we do in C. The preceding dash before include tells make not to throw an error if the files do not exist. This would be the case in a clean build, since the dependencies have yet to be generated. Once they are, make will use them to determine what to rebuild. Open up one of the dependency files to see what it contains. – take main.d for example:
build/obj/main.o: src/main.c include/board.h include/watchdog.hThis is really just another rule the compiler has generated stating that main.o has the prerequisites main.c, board.h, and watchdog.h. The rule will automatically be invoked by make when main.o is to be generated. System header files (ie libc) are not included. The include directive must be placed at the end of the file so as not to supersede the default target – all. If you place the include before the target all, the first rule invoked with be the dependencies, and you will start to see weird behaviour when invoking make without explicit targets as arguments. By playing including the dependency rules at the end, invoking ‘make’ and ‘make all’ from the command line are now synonymous. When we execute make from the command line, this is what the output should look like.

From the output you can see exactly what we have discussed. Each source file is compiled using the arguments defined by CFLAGS into an object file and stored under build/obj. Then, all these object files are linked together to create the final executable app.out. This is the file that is loaded to the MSP430. The functionality is exactly the same as the previous lesson. Some homework for those of you who are interested: create a new rule in the makefile called ‘download’ which will flash the output to the MSP430 automatically using mspdebug. The answer will be available in the next lesson.
Lesson 8: Timers
In the current code base the main application performs a very
simple task, it blinks an LED continuously until a user presses a button
and then it stops. The blinking of the LED is implemented by a simple
while loop and a delay. While in this loop, no other code can be
executing, only the toggling of the LED. This is not a practical
solution to performing a periodic task, which is a basic and common
requirement of an embedded system. What if we also wanted to take a
temperature measurement every 5 seconds. Trying to implement both of
these using loops and delays would be complicated and most likely
inaccurate. To address this issue, we will leverage what we learned
about interrupts and implement a timer. Timers are a fundamental concept
in embedded systems and they have many use cases such as executing a
periodic task, implementing a PWM output or capturing the elapsed time
between two events to name a few. Depending on the architecture, some
timers may have specific purposes. For example, on ARM cores, there is a
systick timer which is used to provide the tick for an operating
system. On most ARM and Power Architecture cores, there is a PIT –
periodic interval timer, which can be used for any type of periodic
task. There are also timers used as a time base, i.e. to keep track of
time for the system clock. At hardware level however, they pretty much
operate using the same principle. The timer module has a clock input,
which is often configurable (internal / external, clock divider etc..).
On each clock pulse, the timer either increments or decrements the
counter. When the counter reaches some defined value, an interrupt
occurs. Once the interrupt is serviced, the timer may restart counting
if it is a periodic timer, or it may stop until reconfigured. For timers
used as a time base, the interrupt may not be required and the timer
shall tick indefinitely and may be queried by software when required. To
save resources, the MSP430 has combined most of this functionality into
two timer modules – Timer_A and Timer_B. They share most of the same
functionality, but there are some differences, notably that timer B can
be configured to be an 8, 10, 12, or 16-bit timer while Timer_A is only a
16-bit timer. The other differences between Timer_A and Timer_B can be
found in section 13.1.1 of the family reference manual. In this lesson,
we will be using Timer_A to implement a generic timer module which can
be used by the application to invoke periodic or one-shot timers. Then
we will modify our application to replace the current implementation of
the blinking LED to use timers so that in between blinking the LED the
CPU can perform other tasks.
Timer_A theory
Before writing any code we must understand how Timer_A works and what registers are available to configure and control this peripheral. Timer_A is a 16-bit timer, which means it can increment to 0xFFFF (65536 cycles) before it rolls over. Both timers on the MSP430 have both capture and compare functionality. In fact, there are 3 timer blocks in Timer_A which can be independently configured to either mode. Capture functionality is used to time events, for example, the time between LED last toggled and the switch is pressed. In this scenario, the timer runs until one of these two events happen at which point the current value of the timer is stored in a capture register and an interrupt is generated. Software can then query the saved value and store it until the next interrupt is generated. The time difference between the two events can then be calculated in terms of ticks. A tick at the hardware level is one clock cycle, or the time between timer a increment or decrement. So if the timer was clocked at 1MHz, each tick would be 1us. The other mode which these timers support is compare mode, which is the standard use for a timer and the one we will be using in this lesson. Its is called compare mode because the timer value is compared against the interval assigned by software. When they match, the time has expired and an interrupt is generated. If the timer is configured as a periodic timer, it will restart the cycle again. The timer module has 3 modes which must be configured correctly for the specific application
 TI MSP430x2xx Family Reference Manual (SLAU144J)
Timer_A control (TACTL) is the general timer control register. It is
used to set up the timer clock source, divider clock mode and
interrupts. The register definition is as follows:
TI MSP430x2xx Family Reference Manual (SLAU144J)
Timer_A control (TACTL) is the general timer control register. It is
used to set up the timer clock source, divider clock mode and
interrupts. The register definition is as follows:
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)
The Timer_A counter register (TAR) is the 16-bit register which contains the current value of the timer. Usually software would not have to read or write to this register unless it is being used as a time base. In most cases an interrupt would indicate when the timer expires, and since software must set the interval, the value of this register at that time would be known.
Timer_A capture/compare register x (TACCRx) and Timer_A capture/compare control register x (TACCTLx) are three pairs of the same registers. Remember earlier we saw that the Timer_A module has three capture / compare blocks that can be independently configured? These are the registers to do so. Software can utilize one, two or all three blocks simultaneously to perform different functions using a single timer. This make efficient use of the microcontroller’s resources since there is only one clock source and divider for all three. But each block can be configured to have a different timeout if in compare mode, or can be configure to capture mode. TACCRx is a 16-bit register which has two functions:
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)

As mentioned earlier, the goal of this tutorial is to replace the blinking LED loop with a timer in order to free up the CPU for other activities. The easiest and most efficient way to do so would be to use a timer which has configurable output to P1.0. We could then set the output mode to toggle and the interval set to 500ms and the LED would toggle automatically, no ISR required. Unfortunately, there is no output to P1.0 so we must write code to do it. However, instead of writing one interrupt handler to blink the LED, we will create a simple timer library which can be used to invoke multiple software timers / timeouts, both periodic or one-shot. This way, one single capture / compare block, as well as a single interrupt, can manage all the timers. Instead of setting the specific timer timeout in the TACCR0 register, the timer module will have a predefined tick interval. Each time the timer expires, the tick will be incremented. When a software timer is created from the application, its timeout will be calculated in terms of ticks (note this software tick is difference than the hardware tick mentioned earlier) relative to the current timer tick value. When the two are equal, it means that timer has expired and a callback function will be invoked. The timer library will have only three simple functions:
To set up the timer module we have to consider a few things. First the timer module will be clocked using SMCLK, which is 1MHz. Therefore, we need to set the divider such that the timer doesn’t overflow before the required interval is attained. Remember the clock is 16 bits, so the maximum number of intervals is 65536. If the clock is not divided, there will be 1 million clock cycles per second. Therefore:
 In 100 ms the counter would have to increment
In 100 ms the counter would have to increment  ,
which is greater than the maximum of 65536. Therefore the clock is too
fast for this resolution. Lets move down a step and divide the clock by
2. Now we have
,
which is greater than the maximum of 65536. Therefore the clock is too
fast for this resolution. Lets move down a step and divide the clock by
2. Now we have
 In 100ms the counter will increment
In 100ms the counter will increment  ,
which is less than the maximum interval. Therefore, we can set the
clock divider to 2. You could use a higher divider as well, only the
number of cycles would have to increase accordingly to obtain the same
timeout.
,
which is less than the maximum interval. Therefore, we can set the
clock divider to 2. You could use a higher divider as well, only the
number of cycles would have to increase accordingly to obtain the same
timeout.
The MSP430G2553 actually has two Timer_A modules, Timer_A3 and Timer1_A3 – where A3 means the time is a Timer_A type, and there are three capture compare blocks in each. This device has no Timer_B modules. The two timer A modules have their own assigned input and outputs as well as their own interrupt vectors. Looking at the datasheet under Table 5 – Interrupt Vector Addresses, you can see that Timer1_A3 has the higher priority. Since our timer API will need to be as efficient as possible in order to service multiple timers, it makes sense to take the one with the higher priority. This way, if Timer_A3 is ever implemented, or the watchdog is repurposed as a timer, this interrupt will always take priority. Also as mentioned earlier, each timer has two IRQs, one for the first block (TA1CCR0 CCIFG) interrupt, and another for the rest. Again, since we want to be as efficient as possible, we will use the former since it has the higher priority, less interrupt latency, and less instructions required to service the interrupt. We need the ISR to be as efficient as possible in order to service the timers as accurately as possible.
Lets start the implementation of the timer library. Our timer library will use a statically allocated list of timer data structures, up to some defined amount, say 10. Each data structure in the array must maintain some information about the timer when it is created, such as the duration, whether the timer is periodic or single shot, a pointer to the callback function, and some private data. The structure looks like this:
The variable _timer_tick declared at the end of this code block is the software timer tick, which will be incremented every time the time module expires and an interrupt fires. Remember that volatile is required for variables which can be modified by an interrupt or outside the immediate scope to inform the compiler not to optimize out the read or write of the variable every single time. Since this variable is written by the ISR and will be read by the application, it is safest to declare it as volatile so that the compiler doesn’t optimize out the read and when the expiry is calculated it is done so correctly.
Next we write the function which configures the timer module as per the requirements previously discussed.
The last component to our timer library is the ISR which handles the timer module expiry.
By creating our timer library, our code in main.c won’t have to deal in frequencies anymore, only in milliseconds, which is much easier and more portable. The timer library takes care of the conversion for us. The toggling of the output to the LED needs to be moved into the timer callback function. The whole delay in the while loop can be removed and replaced with the following code.
Timer_A theory
Before writing any code we must understand how Timer_A works and what registers are available to configure and control this peripheral. Timer_A is a 16-bit timer, which means it can increment to 0xFFFF (65536 cycles) before it rolls over. Both timers on the MSP430 have both capture and compare functionality. In fact, there are 3 timer blocks in Timer_A which can be independently configured to either mode. Capture functionality is used to time events, for example, the time between LED last toggled and the switch is pressed. In this scenario, the timer runs until one of these two events happen at which point the current value of the timer is stored in a capture register and an interrupt is generated. Software can then query the saved value and store it until the next interrupt is generated. The time difference between the two events can then be calculated in terms of ticks. A tick at the hardware level is one clock cycle, or the time between timer a increment or decrement. So if the timer was clocked at 1MHz, each tick would be 1us. The other mode which these timers support is compare mode, which is the standard use for a timer and the one we will be using in this lesson. Its is called compare mode because the timer value is compared against the interval assigned by software. When they match, the time has expired and an interrupt is generated. If the timer is configured as a periodic timer, it will restart the cycle again. The timer module has 3 modes which must be configured correctly for the specific application
- Up mode: timer will start with a value of zero and increment until a software defined value
- Continuous mode: timer will start at zero and increment until it rolls over at 0xFFFF
- Up/Down mode: timer will start at zero, increment until a defined value, and the start decrementing back to zero
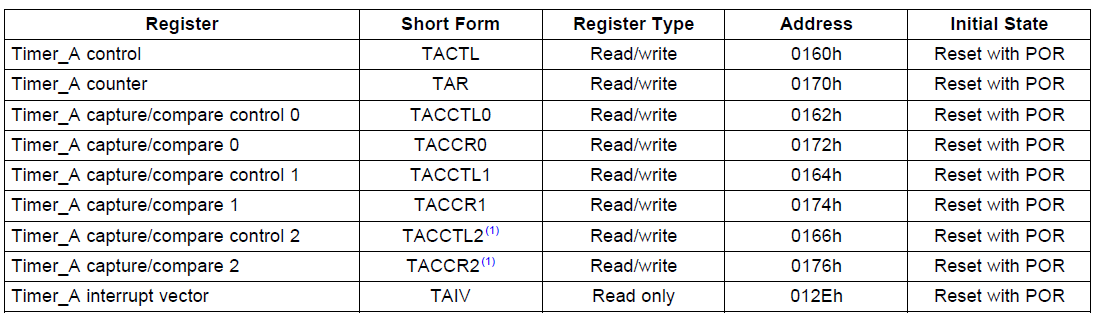 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J) TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)- TASSELx: timer clock source select
- 00 TACLK (external Timer_A clock input)
- 01 ACLK
- 10 SMCLK
- 11 INCLK (device specific)
- IDx: input clock divider
- 00 /1
- 01 /2
- 10 /4
- 11 /8
- MCx: timer module mode control
- 00 Off (timer is halted)
- 01 Up mode
- 10 Continuous mode
- 11 Up/down mode
- TACLR: Timer_A clear
- 0 No action
- 1 Clear the current timer value as well as the divider and mode
- TAIE: Timer_A interrupt enable
- 0 interrupt disabled
- 1 interrupt enabled
- TAIFG: Timer_A interrupt flag
- 0 No interrupt pending
- 1 Timer interrupt pending
The Timer_A counter register (TAR) is the 16-bit register which contains the current value of the timer. Usually software would not have to read or write to this register unless it is being used as a time base. In most cases an interrupt would indicate when the timer expires, and since software must set the interval, the value of this register at that time would be known.
Timer_A capture/compare register x (TACCRx) and Timer_A capture/compare control register x (TACCTLx) are three pairs of the same registers. Remember earlier we saw that the Timer_A module has three capture / compare blocks that can be independently configured? These are the registers to do so. Software can utilize one, two or all three blocks simultaneously to perform different functions using a single timer. This make efficient use of the microcontroller’s resources since there is only one clock source and divider for all three. But each block can be configured to have a different timeout if in compare mode, or can be configure to capture mode. TACCRx is a 16-bit register which has two functions:
- Compare mode: the value set by software in this register will determine the interval at which the timer will expire when in up mode, or which the timer will start decrementing in up/down mode. If the timer is in continuous mode, this register has no effect on the interval. The value in this register is compared against that in TAR.
- Capture mode: this register will hold the value when the capture event occurs. The value from TAR is copied to this register to be read by software.
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)- CMx: capture mode – only valid when block is configured as a capture timer
- 00 No capture
- 01 Capture on rising edge of the timer clock
- 10 Capture on the falling edge of the timer clock
- 11 Capture on both edges of the timer clock
- CCISx: capture input selection – ie what input triggers the capture event
- 00 CCIxA (device specific)
- 01 CCIxB (device specific)
- 10 GND (ground)
- 11 Vcc
- SCS: synchronize capture input signal with the timer clock
- 0 Do not synchronize (asynchronous capture)
- 1 Synchronize the input with the timer (synchronous capture)
- SCCI: synchronized capture/compare input
- The latched value of the input at time of capture
- CAP: capture/compare mode selection
- 0 Compare mode
- 1 Capture mode
- OUTMODx: Timer_A can perform actions to specific output pins
automatically in hardware (no ISR required). This field sets the desired
action
- 000 OUT bit value (see below)
- 001 Set
- 010 Toggle/reset
- 011 Set/reset
- 100 Toggle
- 101 Reset
- 110 Toggle/set
- 111 Reset/set
- CCIE: capture/compare interrupt enable
- 0 Interrupt disabled
- 1 Interrupt enabled
- CCI: value of input signal of capture/compare module
- OUT: output value for OUTMODx = 000
- 0 Output is low
- 1 Output is high
- COV: capture overflow – timer overflowed before capture event occurs
- 0 No capture overflow
- 1 Capture overflow occured
- CCIFG: capture/compare interrupt flag
- 0 No pending interrupt
- 1 Interrupt is pending
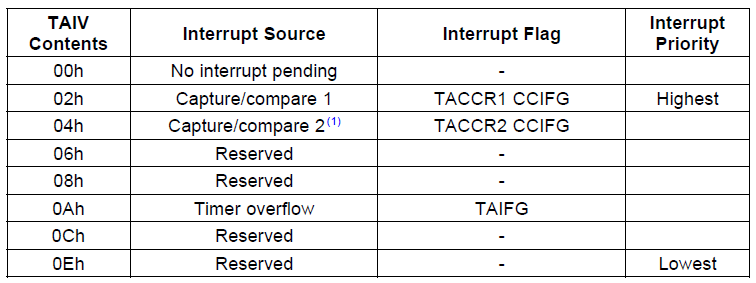
TI MSP430x2xx Family Reference Manual (SLAU144J)
Creating a timer libraryAs mentioned earlier, the goal of this tutorial is to replace the blinking LED loop with a timer in order to free up the CPU for other activities. The easiest and most efficient way to do so would be to use a timer which has configurable output to P1.0. We could then set the output mode to toggle and the interval set to 500ms and the LED would toggle automatically, no ISR required. Unfortunately, there is no output to P1.0 so we must write code to do it. However, instead of writing one interrupt handler to blink the LED, we will create a simple timer library which can be used to invoke multiple software timers / timeouts, both periodic or one-shot. This way, one single capture / compare block, as well as a single interrupt, can manage all the timers. Instead of setting the specific timer timeout in the TACCR0 register, the timer module will have a predefined tick interval. Each time the timer expires, the tick will be incremented. When a software timer is created from the application, its timeout will be calculated in terms of ticks (note this software tick is difference than the hardware tick mentioned earlier) relative to the current timer tick value. When the two are equal, it means that timer has expired and a callback function will be invoked. The timer library will have only three simple functions:
- timer_init: initialize the library the TIMER_A module and any internal data structures to be called from the board initialization routine – board_init
- timer_create: create a timer, set the timeout, periodic or single-shot, the callback routine and some private data
- timer_delete: stop and delete a timer
To set up the timer module we have to consider a few things. First the timer module will be clocked using SMCLK, which is 1MHz. Therefore, we need to set the divider such that the timer doesn’t overflow before the required interval is attained. Remember the clock is 16 bits, so the maximum number of intervals is 65536. If the clock is not divided, there will be 1 million clock cycles per second. Therefore:
In 100 ms the counter would have to increment ,
which is greater than the maximum of 65536. Therefore the clock is too
fast for this resolution. Lets move down a step and divide the clock by
2. Now we have
In 100ms the counter will increment ,
which is less than the maximum interval. Therefore, we can set the
clock divider to 2. You could use a higher divider as well, only the
number of cycles would have to increase accordingly to obtain the same
timeout.The MSP430G2553 actually has two Timer_A modules, Timer_A3 and Timer1_A3 – where A3 means the time is a Timer_A type, and there are three capture compare blocks in each. This device has no Timer_B modules. The two timer A modules have their own assigned input and outputs as well as their own interrupt vectors. Looking at the datasheet under Table 5 – Interrupt Vector Addresses, you can see that Timer1_A3 has the higher priority. Since our timer API will need to be as efficient as possible in order to service multiple timers, it makes sense to take the one with the higher priority. This way, if Timer_A3 is ever implemented, or the watchdog is repurposed as a timer, this interrupt will always take priority. Also as mentioned earlier, each timer has two IRQs, one for the first block (TA1CCR0 CCIFG) interrupt, and another for the rest. Again, since we want to be as efficient as possible, we will use the former since it has the higher priority, less interrupt latency, and less instructions required to service the interrupt. We need the ISR to be as efficient as possible in order to service the timers as accurately as possible.
Lets start the implementation of the timer library. Our timer library will use a statically allocated list of timer data structures, up to some defined amount, say 10. Each data structure in the array must maintain some information about the timer when it is created, such as the duration, whether the timer is periodic or single shot, a pointer to the callback function, and some private data. The structure looks like this:
struct timer
{
uint16_t expiry;
uint16_t periodic;
void (*callback)(void *);
void *arg;
};
static struct timer _timer[MAX_TIMERS];
static volatile uint16_t _timer_tick = 0;
The expiry is the where the next expiry timeout will be stored in
terms of timer ticks. The periodic member holds the duration in timer
ticks of a periodic if set. Meaning, when the expiry time is met, the
value stored in the periodic member can be added to the value of the
current timer tick to obtain the next expiration value. Both these
values are set as 16-bit unsigned integers, because our time tick will
be of the same type. It would be nice to make it 32-bits in order to
support longer timeouts, but the most efficient type to use on any
machine is the native integer size. The callback function is
self-explanatory, but the arg member is important. It is common practice
when providing an interface with callbacks, to permit the storage of
some data that is private to the caller. Another way of looking at it is
like a cookie in your browser. A callback function may be used for
multiple timers, so this data gives the callback function some context
if needed. Making this member a void * means it could point to anything,
even an integer, and the timer module has no idea what it contains.The variable _timer_tick declared at the end of this code block is the software timer tick, which will be incremented every time the time module expires and an interrupt fires. Remember that volatile is required for variables which can be modified by an interrupt or outside the immediate scope to inform the compiler not to optimize out the read or write of the variable every single time. Since this variable is written by the ISR and will be read by the application, it is safest to declare it as volatile so that the compiler doesn’t optimize out the read and when the expiry is calculated it is done so correctly.
Next we write the function which configures the timer module as per the requirements previously discussed.
int timer_init(void)
{
/* Clear the timer structure */
memset(_timer, 0, sizeof(_timer));
/* Set timer to use SMCLK, clock divider 2, up-mode */
TA1CTL = TASSEL1 | ID0 | MC0;
/* TA1CCR0 set to the interval for the desires resolution based on 1MHz SMCLK */
TA1CCR0 = (((1000000 / 2) / 1000) * TIMER_RESOLUTION_MS) - 1;
/* Enable CCIE interupt */
TA1CCTL0 = CCIE;
return 0;
}
First we clear the array of timers for good measure. Next timer
module clock configuration is set to use SMCLK (1MHz) with the divider
set to 2 (0.5MHz), and using up-mode. Remember, up-mode is used to count
from zero up until the interval set in TA1CCR0. Because the counter is
zero based, we must subtract one from the calculation of the number of
ticks required for the desired timer resolution, in this case, 100ms.
Finally we enable the timer interrupt by setting TA1CCL0[CCIE]. This
function must be invoked before the timer library is used, so the best
place to call it from is the board initialization. In the board_init
function (src/board.c), the system clocks are configured. Once this is
done, the timer module can be initialized./* Configure the clock module - MCLK = 1MHz */
DCOCTL = 0;
BCSCTL1 = CALBC1_1MHZ;
DCOCTL = CALDCO_1MHZ;
/* Configure ACLK to to be sourced from VLO = ~12KHz */
BCSCTL3 |= LFXT1S_2;
/* Initialize the timer module */
if (timer_init() != 0) {
/* Timers could not be initialized...hang */
while (1);
}
To create a new timer, we will write another function called
timer_create. This function must take as arguments the desired timeout, a
periodic or single-shot flag, the callback function, and the private
data. The timeout will be in ms, but if the value passed in is less than
the resolution, the timer will not fire accurately. The timeout will
again be defined as a 16-bit unsigned integer, therefore the maximum
timeout will be 65535ms which is 65s. Any value in between will be
rounded to the nearest 100ms. Earlier we said we would always round
down. The following explains why. There are really 3 options: 1) always
round down 2) always round up and 3) round up if the remainder is
greater than 50 otherwise round down. There are pros and cons to each of
these. Always rounding down means that the timer may expire and the
callback invoked earlier than requested. Always rounding up means that
the timer may likely expire late. I would consider this to be the least
desired functionality because in embedded systems there is often some
time constraint that needs to be met (monitor a sensor every 50ms) which
if not met, could have undesired consequences (we will talk more about
real-time embedded systems in a later lesson). Rounding up or down
depending on the remainder would be the most accurate, but it makes the
assumption that if the timer is services ‘a bit late’, that it is
acceptable. Again I consider this to be undesirable. Keep in mind, that
no matter how well you code your timer library there will always be
latency between when the timer expires and your callback is invoked due
to the interrupt latency and ISR latency. Therefore, it is safest to
expire early so we will always round down. However, this does leave one
error case that must be accounted for: a timeout less than 100ms. In
this case we have no option but to round up, since the period would be 0
timer ticks and expiring on the current timer tick would never happen.
Lets take a look at the code.int timer_create(uint16_t timeout_ms, int periodic, void (*callback)(void *), void *arg)
{
int handle = -1;
size_t i;
/* Find a free timer */
for (i = 0; i < MAX_TIMERS; i++) {
if (_timer[i].callback == NULL) {
break;
}
}
/* Make sure a valid timer is found */
if (i < MAX_TIMERS) {
SR_ALLOC();
ENTER_CRITICAL();
/* Set up the timer */
if (periodic != 0) {
_timer[i].periodic = (timeout_ms &lt; 100) ? 1 : (timeout_ms / TIMER_RESOLUTION_MS);
} else {
_timer[i].periodic = 0;
}
_timer[i].callback = callback;
_timer[i].arg = arg;
_timer[i].expiry = _timer_tick + _timer[i].periodic;
EXIT_CRITICAL();
handle = i;
}
return handle;
}
First we must find a free timer. Since there is a small number of
timers, a simple linear search will suffice. A ‘NULL’ callback pointer
is used to indicate a free timer, so the search is ended as soon as this
condition is met. Now that we have found a free timer, we must
elaborate on the concept of critical sections as briefly introduced in
lesson 6 on Interrupts). Since the timer variables is accessed by both
the application and the ISR, we must ensure that the operations which
modify these variables from the application are atomic. If they are not,
several bugs could present themselves. First, if the timer is still
running, the timer tick could increment while the timer expiry is being
calculated. This would result in an incorrect expiry. Even more
seriously, if the application has filled out only part of the timer
structure and the interrupt fires, the structure members may not be
correct, and cause a timer to trigger prematurely, call an invalid
function pointer, or pass an invalid argument to the function.
Basically, as a rule of thumb, any variable(s) that are accessed by both
the application and an ISR have to be locked by a critical section. A
critical section does three things:- saves the status register – this save the interrupt status
- disable interrupts
- restore the status register
#define SR_ALLOC() uint16_t __sr #define ENTER_CRITICAL() __sr = _get_interrupt_state(); __disable_interrupt() #define EXIT_CRITICAL() __set_interrupt_state(__sr)There are two new functions here, _get_interrupt_state and _set_interrupt_state, both of which are intrinsic to gcc. They can be found along with __disable_interrupt (which we have already used) in the file /opt/msp430-toolchain/msp430-none-elf/include/in430.h. These two functions read and write to the status register, where the global interrupt enable is set. The macro SR_ALLOC creates a variable __sr on the stack. ENTER_CRITICAL reads the current status register and saves it to this variable. Then interrupts are disabled. To exit the critical section and restore the previous state, EXIT_CRITICAL copies the saved value of the status register back into the register. As with ISRs, the length of the critical section is crucial to system performance. If the critical section is long, ISR may be missed or delayed. To minimize this, only the exact operation(s) which require locking should be in the critical section. In this case, any access to the global variables of the timer module should be wrapped in the critical section. The function returns a value which can be used to by the application to delete the timer. This will be called the timer handle, and will simply be the index of the timer being created. The timer_delete function is extremely simple, as it only has to clear the callback in order to disable the timer from being invoked. It is also wrapped in a critical section for good measure.
int timer_delete(int handle)
{
int status = -1;
if (handle < MAX_TIMERS) {
SR_ALLOC();
ENTER_CRITICAL();
/* Clear the callback to delete the timer */
_timer[handle].callback = NULL;
EXIT_CRITICAL();
status = 0;
}
return status;
}
You might wonder why this simple operation needs to be wrapped in a critical section. As it turns out, it doesn’t really
because it will be compiled down to a single instruction which clears
the memory. However, this is an assumption about the compiler, and not
one that cannot always be made. In addition, it is possible that over
time this time module evolves and the delete function required more in
the implementation, so it is best practice to show that a critical
section is required so that it isn’t forgotten later on.The last component to our timer library is the ISR which handles the timer module expiry.
__attribute__((interrupt(TIMER1_A0_VECTOR))) void timer1_isr(void)
{
size_t i;
/* Clear the interrupt flag */
TA1CCTL0 &amp;= ~CCIFG;
/* Increment the timer tick */
_timer_tick++;
for (i = 0; i < MAX_TIMERS; i++) {
/* If the timer is enabled and expired, invoke the callback */
if ((_timer[i].callback != NULL) && (_timer[i].expiry == _timer_tick)) {
_timer[i].callback(_timer[i].arg);
if (_timer[i].periodic > 0) {
/* Timer is periodic, calculate next expiration */
_timer[i].expiry += _timer[i].periodic;
} else {
/* If timer is not periodic, clear the callback to disable */
_timer[i].callback = NULL;
}
}
}
}
First we must clear the interrupt flag so that the interrupt is
cleared and the timer restarts counting. Next the timer tick is
incremented and then compared against the expiry of each enabled timer
in the array. If the timer is due, the callback is invoked with the
private data passed in as the argument. Finally, if the timer is
periodic, the next expiry is calculated, otherwise the timer is disabled
by clearing the callback.By creating our timer library, our code in main.c won’t have to deal in frequencies anymore, only in milliseconds, which is much easier and more portable. The timer library takes care of the conversion for us. The toggling of the output to the LED needs to be moved into the timer callback function. The whole delay in the while loop can be removed and replaced with the following code.
while (1) {
watchdog_pet();
/**
* If blinking is enabled and the timer handle is
* negative (invalid) create a periodic timer with
* a timeout of 500ms
*/
if (_blink_enable != 0 ) {
if (timer_handle &lt; 0) {
timer_handle = timer_create(500, 1, blink_led, NULL);
}
} else {
if (timer_handle != -1) {
timer_delete(timer_handle);
timer_handle = -1;
}
}
}
This will check if blinking is enabled, and if it is, it will create a
timer to toggle the LED. The timer will be periodic with a timeout of
500ms. Once the timer is created, the timer handle will be non-negative,
and therefore the while loop will continue on. If the blinking is
disabled, the timer will be deleted. The callback function, blink_led,
is a new function which toggles the LED. The existing code in the while
loop to toggle the LED is moved into here. Note in this case we do not
use the argument for any private data.static void blink_led(void *arg)
{
(void) arg;
/* Toggle P1.0 output */
P1OUT ^= 0x01;
}
Compile the latest code and program your launchpad. You should see
that it behaves exactly as it did previously. To the user there is no
difference, but the implementation allows us to have much more
flexibility with our code. Now we can actually start using the while
loop for other functions.Lesson 9: UART
An embedded system often requires a means for communicating with
the external world for a number of possible reasons. It could be to
transferring data to another device, sending and receiving commands, or
simply for debugging purposes. One of the most common interfaces used in
embedded systems is the universal asynchronous receiver/transmitter
(UART). When a board arrives in the hands of the
software/firmware team, the first step is typically to get the debug
console functional. The debug console is a serial interface which
historically is implemented as RS-232 to connect with a PC serial port.
These days most PCs not longer have a serial port, so it is more
commonly seen implemented using USB, however the concept is the same. In
this lesson, we will learn a bit about the theory behind UART and
RS-232, learn how to write a simple UART driver for the MSP430, and
create a menu which gives the user the ability to change the frequency
of the blinking LED during runtime.
It is important to distinguish the difference between the terms UART and RS-232. The UART is the peripheral on the microcontroller which can send and receive serial data asynchronously, while RS-232 is a signalling standard. RS-232 has no dependency on any higher level protocol, however it does have a simple layer 1 (physical layer) set of standards which must be followed. The UART module may support several features which allow it to interface with various signaling standard such as RS-232 or RS-485 – another serial interface commonly used in industrial applications.
RS-232
RS-232 is a point-to-point signalling standard, meaning only two devices can be connected to each other. The minimum connection required for bidirectional communication is three signals: transmit (TX), receive (RX), and ground. The separate RX and TX lines mean that data can flow in both directions at the same time. This is called full-duplex and it is the standard means for communicating over serial. However, depending on the higher level protocols, there may be a need to block the transmitter while receiving. This is called half-duplex. Hardware flow control can also be enabled in order to mitigate the flow of data. Two optional lines RTS and CTS are provided for this function. Typically RS-232 is used without hardware flow control and at full duplex. We are not going to go into details on all the possible configurations, however you can read about it here if you are interested.
RS-232 signals are different than than what we are used to in the digital world because the voltage switches between negative and positive values. The standard defines signals which typically vary from -5V to +5V, but can as much as -15V to +15V. The idle state of the line is at the negative voltage level and is referred to as a ‘mark’. The logical value of a mark is one (1). The positive voltage is called a ‘space’, and indicates a logic zero (0). To begin a transmission of data, a start bit (space) is sent to the receiver. Then the data is transmitted. The data can be in several possible formats depending what is supported by both devices. To end a transmission, a stop bit (mark) is sent to the receiver, and the held in the idle state. At least one stop bit is required, but two stop bits are often supported as well.
When hooking up RS-232 to an MCU it is important to remember that the voltage levels supported by the IO are different (0V – 3.3V), so an external transceiver is required to convert the signals to the appropriate levels. If you try to connect RS-232 directly to the MSP430 or most other microcontrollers it will not work and likely cause some damage. The MAX232 and variants are some of of the most common RS-232 transceivers on the market. It is extremely simple to use and can be easily breadboarded. Here is an example of one I have built:

Fortunately, the MSP430 Launchpad has a serial to USB converter built right onto the the board so this additional equipment is not required. Therefore, we won’t cover how to build it in this tutorial, but if you would like to know more feel free to shoot me an email. We will look in more detail at the MSP430 implementation later on.
Universal asynchronous receiver/transmitter (UART)
UART peripherals typically have several configurable parameters required to support different standards. There are five parameters which must be configured correctly to establish a basic serial connection:
 Image courtesy of one of our very active members, Yury. Thanks!
Here we have a 5 bit transmission with an
odd parity. Since there are an odd number of 1s in the transmission, the
parity bit is 0. The data bit closest to the start bit is the LSB. The
number of stop bits is not defined since we only see one transmission.
However if there was 1 stop bit and we were running at 9600 baud, this
configuration would be abbreviated 9600 5O1. Other common configuration
include:
Image courtesy of one of our very active members, Yury. Thanks!
Here we have a 5 bit transmission with an
odd parity. Since there are an odd number of 1s in the transmission, the
parity bit is 0. The data bit closest to the start bit is the LSB. The
number of stop bits is not defined since we only see one transmission.
However if there was 1 stop bit and we were running at 9600 baud, this
configuration would be abbreviated 9600 5O1. Other common configuration
include:
9600 7E1 – 9600 baud, 7 bits data, even parity and 1 stop bit
9600 8N1 – 9600 baud , 8 bits data, no parity and 1 stop bit
115200 8N1 – 115200 baud, 8 bits data, no parity and 1 stop bit
The MSP430 UART
The MSP430 provides a module called the USCI (universal serial communications interface) which supports multiple types of serial interfaces. There are two variants of the USCI module each of which support specific interfaces:
USCI_A: UART and SPI
USCI_B: SPI and I2C
A given device may have none, one or more of each of these modules, depending on its implementation. It is important to check in the datasheet to see exactly what is supported in the device being used. Since USCI_A actually supports multiple standards, there are many registers and settings. We will only concentrate on those relative to this lesson. The register map for the USCI_A module is as follows:
 TI MSP430x2xx Family Reference Manual (SLAU144J)
The first register, UCAxCTL0 or USCI_Ax Control Register 0 contains the configuration for the protocol.
TI MSP430x2xx Family Reference Manual (SLAU144J)
The first register, UCAxCTL0 or USCI_Ax Control Register 0 contains the configuration for the protocol.
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)
The UCAxSTAT register contains the status of the module.
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)
 TI MSP430x2xx Family Reference Manual (SLAU144J)
Note, the undefined bits may be used by other modules depending on
the specific device. See the device data-sheet for more information.
TI MSP430x2xx Family Reference Manual (SLAU144J)
Note, the undefined bits may be used by other modules depending on
the specific device. See the device data-sheet for more information.
 TI MSP430x2xx Family Reference Manual (SLAU144J)
Note, the undefined bits may be used by other modules depending on
the specific device. See the device data-sheet for more information.
TI MSP430x2xx Family Reference Manual (SLAU144J)
Note, the undefined bits may be used by other modules depending on
the specific device. See the device data-sheet for more information.
To receive and transmit data respectively there are two 8-bit registers, UCAxRXBUF and UCAxTXBUF. When the USCI is configured for 7-bit mode, the MSB of both of these registers is unused. To initiate a transfer, the data is copied to UCAxTXBUF. This also clears UCAxTXIFG (transmit complete interrupt flag). Once the transmission is complete, UCAxTXIFG will be set. Similarly, when data is received on line, it is stored in UCAxRXBUF and UCAxRXIFG (receive interrupt flag) is set. The data is held in this register until it is read by software or another frame is received, in which case it is overwritten and UCAxSTAT[UCOE] is set. When UCAxRXBUF is read by software, UCAxRXIFG is cleared.
Registers UCAxIRTCTL, UCAxIRRCTL, UCAxABCTL are not required for standard UART mode and therefore will not be covered in this lesson. The former 2 are for infrared devices, while the latter is for UART with auto baud rate detection.
The code
For this tutorial we want to implement a UART driver with some simple APIs which can be used to print a menu and accept user input. The goal is to create a menu which will allow us to change the frequency of the blinking LED. We will not spend much time on the implementation of the menu as it is not important for the purposes of learning how to use the UART. Get the latest code from github to get started.
When programming for your desktop, there are plenty of ways using the standard library to print and read from the console. The most commonly used is printf, however there are others such as puts, putchar, and getchar which are more limited but simpler to implement. Our UART driver will follow this model, however we do not have the concept of stdin and stdout, file descriptors and all the rest that comes along with the actual implementation. In fact, the standard C library we have as part of gcc (newlib), has the full implementation, however it is too big (takes too much memory) for the MSP430G2553. Try to use snprintf or printf and you will soon run of of space in the text section (where the code goes). Perhaps it would fit on some of the bigger devices, however in embedded programming, unless you are running a full blown OS such as Linux, the standard C library is often specifically written only with the functionality required. For example, printf may not support all the formatters, there are no actual file descriptors and often it accesses the UART directly.
Before implementing the functions to read and write, we must initialize the USCI peripheral. The UART configuration we will be using is 9600 8N1. The MSP430G2553 has one USCI_A module, so we will write a the driver specifically for it. Two new files have been created, uart.c and uart.h located in the src and include directories respectively. The function uart_init is implemented as follows:
The USCI module is held in reset by default. We can easily check if it has already been initialized by checking the value of UCA0CTL1[UCA0CTL1]. It is important to keep the USCI in reset until the configuration is complete and ready to communicate. Next the USCI clock is set to SMCLK, which is 1MHz. To set the baud rate, we will use the table from the reference manual. Rather than calculating the values for each register, which is fairly complex and would be quite heavy mathematically for the MSP430, it is more efficient to simply save the register values in a table that can be referenced for a given baud rate. The table structure looks like this:
A note on the above code: the ‘for’ loop iterates through the baud rate table using a macro ARRAY_SIZE which is defined in a new file include/defines.h. This file will be the default location to put any generic macros or hash defines. This particular macro makes it very simple to calculate the size of an array. Since in C an array must have a defined size at compile time, you can use the sizeof() operator to find number of bytes required to store the whole array. Dividing this value by the size of one element in the array – by convention we use the first one – gives the number of elements in the array. This value will be determined at compile time so there is no runtime penalty for the division.
The first IO function we have is uart_getchar, which reads one character at a time from the UART. If there are no characters to read, it returns -1, commonly referred to in *nix talk as EOF (end of file). In this simple implementation, we will not implement any UART interrupts since polling is not required. However, the interrupt flag IFG2[UCA0RXIFG] can be read to determine if a character has been received. If it has, the character is read from UCA0RXBUF.
The final function is uart_puts, which is really just an extension of uart_putc that can print a string rather than individual characters.The implementation is exactly the same as uart_putc, except we iterate through the string until NULL is found, which indicates the end of the string.

To avoid having to use “\n\r” everywhere, we can make this function handle both, by checking if the current character is a line feed and automatically adding a carriage return.
It is important to note, we prefixed all these functions with uart_ not only because they are part of the UART API, but because we do not want to conflict with the standard C library routines. Depending on how the library is implemented, you may be able to override some of the functions, but it can be unsafe and unpredictable. If you really want to write a custom standard C library, there are linker options which can tell gcc to not include them. This means however that none of the standard header files are accessible, and therefore must all be redefined in your software.
The UART driver must now be integrated with our existing application. First we need to add the initialization to the board.c file. In addition, the pin muxing of P1.1 and P1.2 must be configured to USCI TX and RX. Below is an excerpt from the board_init function.
To build a menu, the API defined in include/menu.h provides a structure called menu_item which contains the text and the callback of the each selection.
In the existing while loop, we make a call to menu_run in order to continuously monitor for user input. When the user selects option 1, the callback function defined in the main menu, set_blink_freq, will be invoked.
The setup
Since UART is relatively slow, it is sometimes implemented bit-banged using standard GPIOs rather than with the USCI peripheral as we have. On the Launchpad, TI has given us the option to use either software UART (bit-banging) or the hardware UART (USCI) with some jumper settings on the board. They made some changes between rev 1.4 and 1.5 to facility this functionality, so the jumper settings between the two are different. If your board is older than rev 1.4, I suspect it will be the same, but if not please inform me.
In both cases, the board is shipped with the jumpers set for software UART, therefore we have to change them. On the rev 1.4 boards, you will need some jumper cables, since you need to cross the pins like this:

On rev 1.5, they made it a bit easier and you simply need to rotate the two jumpers 90 degrees as follows:

Now your hardware should be ready to go. When you connect your Launchpad to the USB port on your computer, the device will enumerate as two classes: HID (human interface device) required for the programming and debugging, and CDC (communications device class) for the UART. In Windows, if you check in the device manager, you will see that the device is not found. This is normal, and TI supplies drivers for both channels (more on this later). On Linux (running as a host), the CDC channel comes up as /dev/ttyACMx (where x is an integer value) and can be read directly as if it were a regular serial port. However, connect the debugger using mspdebug, and now you lost your serial connection. The way the debugger and serial port were implemented on the Launchpad is somewhat flawed. What they tried to do is valid, but for some reason it is unfortunately quite flakey, especially in Linux. Only one can run at a time, which is a bit inconvenient, but what’s worse the CDC channel doesn’t work at all in VirtualBox. I tried for days recompiling kernel modules, different setups etc… with no luck. There are few options/workarounds which worked for me and you can decide which is best for you.
Option 1: Running in a VM with Windows host using Tera Term in Windows for serial
If you have been following these tutorials from the beginning, you may have set up your environment as I have, a Windows host and Linux guest running in VirtualBox. Unfortunately, the workaround for this setup is the most clumsy of the options. I’m also not the biggest fan because I prefer minicom (and Linux) over Tera Term, but it is fairly reliable nonetheless. The other thing I don’t like about this option is that you have to install drivers on Windows. I will show you how to do it as cleanly as possible.
Option 2: Linux host environment
If you are following along with a Linux host, minicom is my serial terminal of choice. Minicom is all command line, so if you are not comfortable with that, then you can install putty from the repositories. If you choose to use minicom and are having problems setting it up, I can answer any questions you may have. Once you have your terminal installed, you can plug in the Launchpad and open up /dev/ttyACM0 (or whatever port yours came up as). You should see the serial output being printed at this time. Now if you want to use the debugger, close minicom and open mspdebug. You should be able to program and debug. If you want to go back to serial, you must close minicom, unplug the device, wait a few seconds and plug it back in again before opening minicom.
Option 3: Use an external UART to USB converter
The pitfall with both of the previous options is that you cannot use mspdebug and access the menu at the same time, making debugging difficult. This may not be an issue for now since the code provided should work without modification, however it is ideal to have this capability. To achieve this, you can use a UART to USB converter (this one from Sparkfun is cheap and easy to use) or serial to USB converter with the MAX3232 (the 3.3V compatible version of the MAX232 – see the bread boarded picture from above). With a UART to USB, you can simply remove the jumpers from the Launchpad for the TX and RX lines, and connect the device straight onto the headers using some jumper cables.
Testing the UART
Now that you have your device and PC all set up for UART, reset the device and take a look at the menu. We have only one option for now (we will add to this in the future), which will set the frequency of the blinking LED. Select this option and enter a frequency of 2Hz. From the code described earlier, we know that this only sets a variable containing the timer period. For it to take effect, you must use the push button to start the blinking. Now select the menu option again and change the frequency to 4Hz. Stop and restart the blinking. You should see the LED blink twice as fast. In the next lesson, we will look at improving our UART driver to handle receiving characters even when the CPU is busy doing other stuff.
It is important to distinguish the difference between the terms UART and RS-232. The UART is the peripheral on the microcontroller which can send and receive serial data asynchronously, while RS-232 is a signalling standard. RS-232 has no dependency on any higher level protocol, however it does have a simple layer 1 (physical layer) set of standards which must be followed. The UART module may support several features which allow it to interface with various signaling standard such as RS-232 or RS-485 – another serial interface commonly used in industrial applications.
RS-232
RS-232 is a point-to-point signalling standard, meaning only two devices can be connected to each other. The minimum connection required for bidirectional communication is three signals: transmit (TX), receive (RX), and ground. The separate RX and TX lines mean that data can flow in both directions at the same time. This is called full-duplex and it is the standard means for communicating over serial. However, depending on the higher level protocols, there may be a need to block the transmitter while receiving. This is called half-duplex. Hardware flow control can also be enabled in order to mitigate the flow of data. Two optional lines RTS and CTS are provided for this function. Typically RS-232 is used without hardware flow control and at full duplex. We are not going to go into details on all the possible configurations, however you can read about it here if you are interested.
RS-232 signals are different than than what we are used to in the digital world because the voltage switches between negative and positive values. The standard defines signals which typically vary from -5V to +5V, but can as much as -15V to +15V. The idle state of the line is at the negative voltage level and is referred to as a ‘mark’. The logical value of a mark is one (1). The positive voltage is called a ‘space’, and indicates a logic zero (0). To begin a transmission of data, a start bit (space) is sent to the receiver. Then the data is transmitted. The data can be in several possible formats depending what is supported by both devices. To end a transmission, a stop bit (mark) is sent to the receiver, and the held in the idle state. At least one stop bit is required, but two stop bits are often supported as well.
When hooking up RS-232 to an MCU it is important to remember that the voltage levels supported by the IO are different (0V – 3.3V), so an external transceiver is required to convert the signals to the appropriate levels. If you try to connect RS-232 directly to the MSP430 or most other microcontrollers it will not work and likely cause some damage. The MAX232 and variants are some of of the most common RS-232 transceivers on the market. It is extremely simple to use and can be easily breadboarded. Here is an example of one I have built:
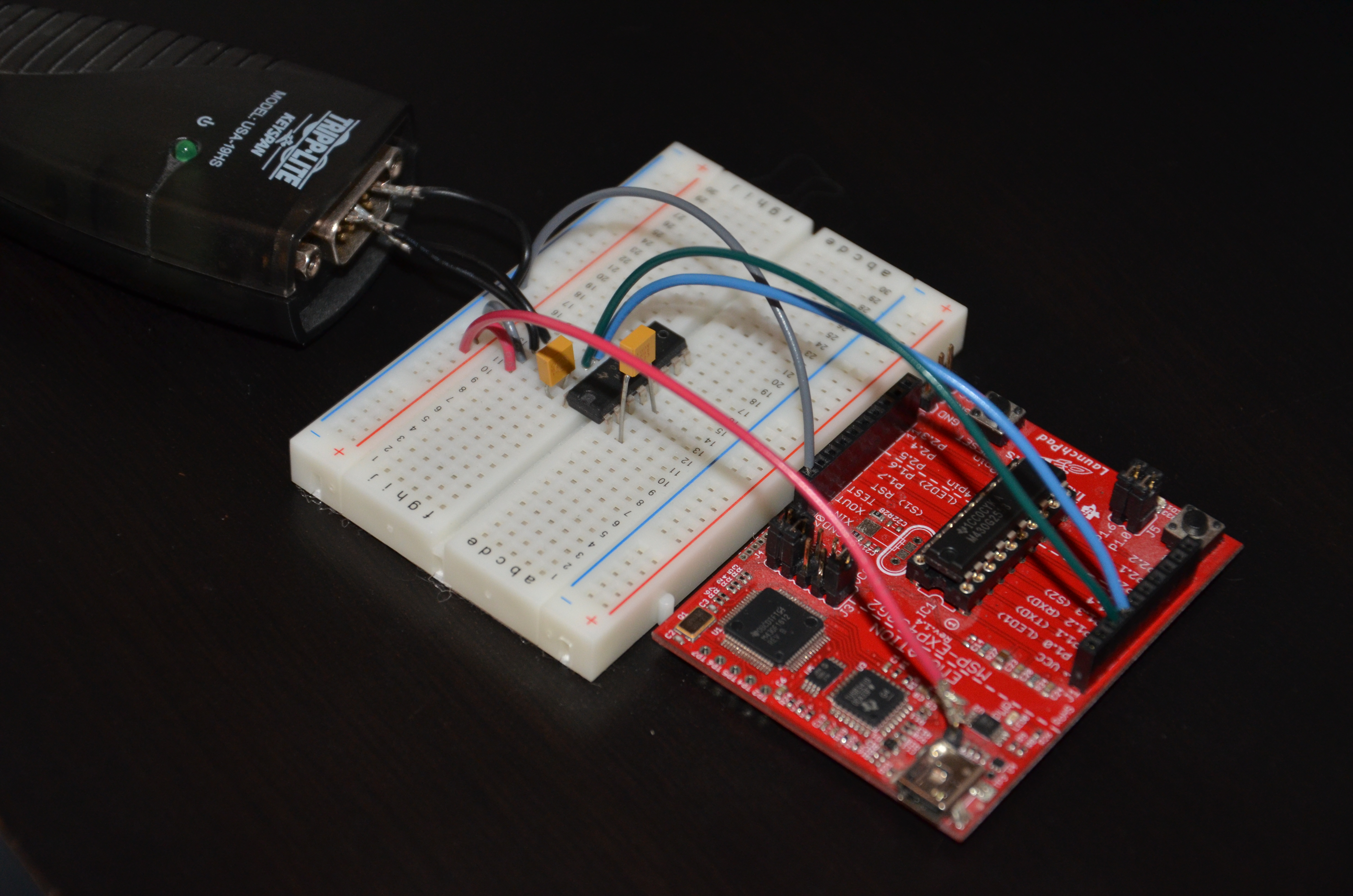
Fortunately, the MSP430 Launchpad has a serial to USB converter built right onto the the board so this additional equipment is not required. Therefore, we won’t cover how to build it in this tutorial, but if you would like to know more feel free to shoot me an email. We will look in more detail at the MSP430 implementation later on.
Universal asynchronous receiver/transmitter (UART)
UART peripherals typically have several configurable parameters required to support different standards. There are five parameters which must be configured correctly to establish a basic serial connection:
- Baud rate: Baud rate is the number of symbols or modulations per second. Basically, the baud rate indicates how many times the lines can change state (high or low) per second. Since each symbol represents one bit, the bit rate equals the baud rate. For example, if the baud rate is 9600, there are 9600 symbols sent per second and therefore the bit rate is 9600 bits per second (bps) .
- Number of data bits: The number of data bits transmitted is typically between 5 and 8, with 7 and 8 being the most common since an ASCII character is 7 bits for the standard set and 8 bits for the extended.
- Parity: The parity can be even, odd, mark or space. The UART peripheral calculates the number of 1s present in the transmission. If the parity is configured to even and the number of 1’s is even then the parity bit is set zero. If the number of 1s is odd, the parity bit is set to a 1 to make the count even. If the parity is configured to odd, and the number of 1s is odd, then parity bit is set to 0. Otherwise it is set to 1 to make the count odd. Mark and space parity mean that the parity bit will either be one or zero respectively for every transmission.
- Stop bits: The number of stop bits is most commonly configurable to either one or two. On some devices, half bits are supported as well, for example 1.5 stop bits. The number of stop bits determines how much of a break is required between concurrent transmissions.
- Endianess: Some UART peripherals offer the option to send the data in either LSB (least significant bit) or MSB (most significant bit). Serial communication of ASCII characters is almost always LSB.
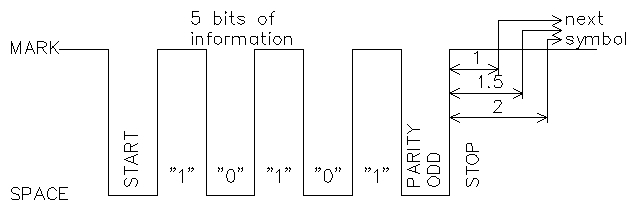 Image courtesy of one of our very active members, Yury. Thanks!
Image courtesy of one of our very active members, Yury. Thanks!9600 7E1 – 9600 baud, 7 bits data, even parity and 1 stop bit
9600 8N1 – 9600 baud , 8 bits data, no parity and 1 stop bit
115200 8N1 – 115200 baud, 8 bits data, no parity and 1 stop bit
The MSP430 UART
The MSP430 provides a module called the USCI (universal serial communications interface) which supports multiple types of serial interfaces. There are two variants of the USCI module each of which support specific interfaces:
USCI_A: UART and SPI
USCI_B: SPI and I2C
A given device may have none, one or more of each of these modules, depending on its implementation. It is important to check in the datasheet to see exactly what is supported in the device being used. Since USCI_A actually supports multiple standards, there are many registers and settings. We will only concentrate on those relative to this lesson. The register map for the USCI_A module is as follows:
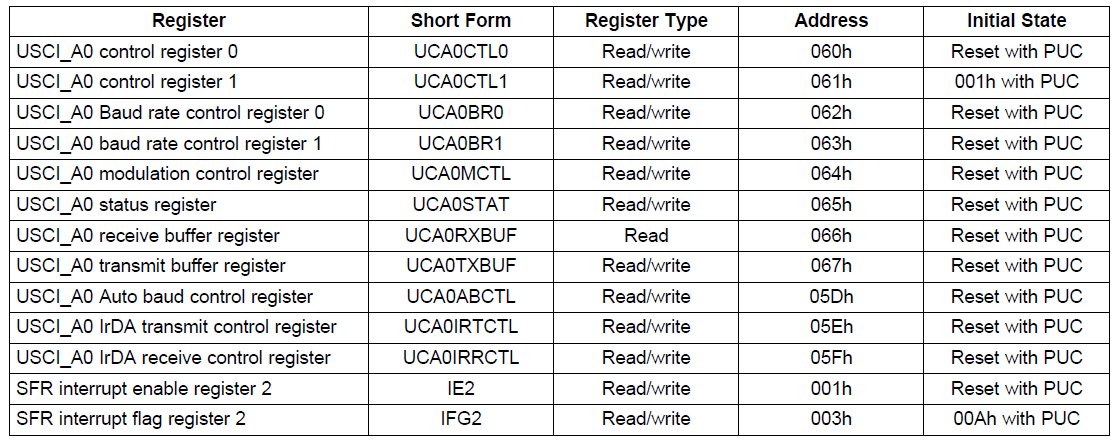 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J) TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)- UCPEN: Parity enable
- 0 Parity disabled
- 1 Parity enabled
- UCPAR: Parity mode selection
- 0 Odd parity
- 1 Even parity
- UCMSB: MSB (most significant bit) first selection
- 0 LSB first
- 1 MSB first
- UC7BIT: Data length
- 0 8-bit data
- 1 7-bit data
- UCSPB: Number of stop bits
- 0 One stop bit
- 1 Two stop bits
- UCMODEx: USCI mode asynchronous mode (only valid when UCSYNC=0)
- 00 UART mode
- 01 Idle-line multiprocessor mode
- 10 Address-bit multiprocessor mode
- 11 UART mode with automatic baud rate detection
- UCSYNC: Synchronous/Asynchronous mode
- 0 Asynchronous (UART)
- 1 Synchronous (SPI)
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)- UCSSELx: USCI clock source selct
- 00 UCLK external clock source
- 01 ACLK
- 10 SMCLK
- 11 SMCLK
- UCRXEIE: Erroneous character received interrupt enable
- 0 Characters received with errors are dropped and no interrupt raised
- 1 Characters received with errors are retained and UCAxRXIFG is set
- UCBRKIE: Break character received interrupt enable
- 0 Receving a break character does raise an interrupt
- 1 Receiving a break character raises UCAxRXIFG
- UCDORM: Set USCI module to sleep mode (dormant)
- 0 Not in sleep mode
- 1 Sleep mode – certain characters can still raise an interrupt on UCAxRXIFG
- UCTXADDR: Transmit address marker – only valid for address-bit multiprocessor mode
- 0 Next frame is data
- 1 Next frame is marked as an address
- UCTXBRK: Transmit break – all symbols in the transmission are low
- 0 Next frame is not a break
- 1 Next frame transmitted is a break
- UCSWRST: Module software reset – USCI is held in reset by default on
power on or device reset and must be cleared by software to enable the
module
- 0 USCI operational – not in reset
- 1 Reset USCI module
The UCAxSTAT register contains the status of the module.
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)- UCLISTEN: Loopback (listen) enable. When enabled TX is fed into the RX
- 0 Loopback disabled
- 1 Loopback enabled
- UCFE: Framing error detect
- 0 No framing error detected
- 1 A frame with a low stop bit detected
- UCOE: Overrun error – a character was received and stored in
UCAxRXBUF before it was read by software (i.e. character is dropped).
Must not be cleared by software
- 0 No overrun error detected
- 1 Overrun error detected
- UCPE: Parity error detect
- 0 No parity error detected
- 1 Parity error detected
- UCBRK: Break frame detect
- 0 No break frame detected
- 1 Break frame detected
- UCRXERR: Character received with an error. One or more other error
bits will be set when this bit is set. This bit is cleared by reading
UCAxRXBUF
- 0 Character received does not contain an error
- 1 Character received contains error
- UCADDR: Address received – only in address-bit multiprocessor mode
- 0 Data received
- 1 Address received (address bit set)
- UCIDLE: Idle line detected – only in idle-line multiprocessor mode
- 0 Idle line not detected
- 1 Idle line detected
- UCBUSY: USCI module busy – either transmit or receive operation in progress
- 0 USCI not busy
- 1 USCI operation in progress
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)- UCA0TXIE: USCI_A0 transmit interrupt enable
- 0 Transmit interrupt disabled
- 1 Transmit interrupt enabled
- UCA0RXIE: USCI_A0 receive interrupt enable
- 0 Receive interrupt disabled
- 1 Receive interrupt enabled
 TI MSP430x2xx Family Reference Manual (SLAU144J)
TI MSP430x2xx Family Reference Manual (SLAU144J)- UCA1TXIFG: USCI_A0 transmit complete interrupt flag
- 0 No interrupt pending
- 1 Interrupt pending
- UCA1RXIFG: USCI_A0 receive interrupt flag
- 0 No interrupt pending
- 1 Interrupt pending
To receive and transmit data respectively there are two 8-bit registers, UCAxRXBUF and UCAxTXBUF. When the USCI is configured for 7-bit mode, the MSB of both of these registers is unused. To initiate a transfer, the data is copied to UCAxTXBUF. This also clears UCAxTXIFG (transmit complete interrupt flag). Once the transmission is complete, UCAxTXIFG will be set. Similarly, when data is received on line, it is stored in UCAxRXBUF and UCAxRXIFG (receive interrupt flag) is set. The data is held in this register until it is read by software or another frame is received, in which case it is overwritten and UCAxSTAT[UCOE] is set. When UCAxRXBUF is read by software, UCAxRXIFG is cleared.
Registers UCAxIRTCTL, UCAxIRRCTL, UCAxABCTL are not required for standard UART mode and therefore will not be covered in this lesson. The former 2 are for infrared devices, while the latter is for UART with auto baud rate detection.
The code
For this tutorial we want to implement a UART driver with some simple APIs which can be used to print a menu and accept user input. The goal is to create a menu which will allow us to change the frequency of the blinking LED. We will not spend much time on the implementation of the menu as it is not important for the purposes of learning how to use the UART. Get the latest code from github to get started.
When programming for your desktop, there are plenty of ways using the standard library to print and read from the console. The most commonly used is printf, however there are others such as puts, putchar, and getchar which are more limited but simpler to implement. Our UART driver will follow this model, however we do not have the concept of stdin and stdout, file descriptors and all the rest that comes along with the actual implementation. In fact, the standard C library we have as part of gcc (newlib), has the full implementation, however it is too big (takes too much memory) for the MSP430G2553. Try to use snprintf or printf and you will soon run of of space in the text section (where the code goes). Perhaps it would fit on some of the bigger devices, however in embedded programming, unless you are running a full blown OS such as Linux, the standard C library is often specifically written only with the functionality required. For example, printf may not support all the formatters, there are no actual file descriptors and often it accesses the UART directly.
Before implementing the functions to read and write, we must initialize the USCI peripheral. The UART configuration we will be using is 9600 8N1. The MSP430G2553 has one USCI_A module, so we will write a the driver specifically for it. Two new files have been created, uart.c and uart.h located in the src and include directories respectively. The function uart_init is implemented as follows:
int uart_init(uart_config_t *config)
{
int status = -1;
/* USCI should be in reset before configuring - only configure once */
if (UCA0CTL1 & UCSWRST) {
size_t i;
/* Set clock source to SMCLK */
UCA0CTL1 |= UCSSEL_2;
/* Find the settings from the baud rate table */
for (i = 0; i < ARRAY_SIZE(baud_tbl); i++) {
if (baud_tbl[i].baud == config->baud) {
break;
}
}
if (i < ARRAY_SIZE(baud_tbl)) {
/* Set the baud rate */
UCA0BR0 = baud_tbl[i].UCAxBR0;
UCA0BR1 = baud_tbl[i].UCAxBR1;
UCA0MCTL = baud_tbl[i].UCAxMCTL;
/* Enable the USCI peripheral (take it out of reset) */
UCA0CTL1 &= ~UCSWRST;
status = 0;
}
}
return status;
}
The function takes one argument of type uart_config_t from
include/uart.h, which is for the most part a placeholder structure for
any attributes which need to be configured. For now, the baud rate is
the only member.typedef struct
{
uint32_t baud;
} uart_config_t;
The baud rate must be defined as a 32-bit unsigned integer because as
we learned earlier, baud rates up to 115200 are common, and this
integer value does not fit into the native integer size of 16 bits.The USCI module is held in reset by default. We can easily check if it has already been initialized by checking the value of UCA0CTL1[UCA0CTL1]. It is important to keep the USCI in reset until the configuration is complete and ready to communicate. Next the USCI clock is set to SMCLK, which is 1MHz. To set the baud rate, we will use the table from the reference manual. Rather than calculating the values for each register, which is fairly complex and would be quite heavy mathematically for the MSP430, it is more efficient to simply save the register values in a table that can be referenced for a given baud rate. The table structure looks like this:
struct baud_value
{
uint32_t baud;
uint16_t UCAxBR0;
uint16_t UCAxBR1;
uint16_t UCAxMCTL;
};
Currently we will only support 9600 baud, since this is the maximum
of the serial USB interface of the Launchpad. Therefore the table will
have only one entry as defined below:const struct baud_value baud_tbl[] = {
{9600, 104, 0, 0x2}
};
The initialization function will take the baud rate passed in the
configuration structure and iterate through the list of supported baud
rates until a match is found. The register values are copied from the
table into the peripheral. The default register values for USCA0CTL0
configure the device for 8 bit data, no parity and 1 stop bit, so no
further configuration is required. The module is taken out of reset and
is ready to go.A note on the above code: the ‘for’ loop iterates through the baud rate table using a macro ARRAY_SIZE which is defined in a new file include/defines.h. This file will be the default location to put any generic macros or hash defines. This particular macro makes it very simple to calculate the size of an array. Since in C an array must have a defined size at compile time, you can use the sizeof() operator to find number of bytes required to store the whole array. Dividing this value by the size of one element in the array – by convention we use the first one – gives the number of elements in the array. This value will be determined at compile time so there is no runtime penalty for the division.
The first IO function we have is uart_getchar, which reads one character at a time from the UART. If there are no characters to read, it returns -1, commonly referred to in *nix talk as EOF (end of file). In this simple implementation, we will not implement any UART interrupts since polling is not required. However, the interrupt flag IFG2[UCA0RXIFG] can be read to determine if a character has been received. If it has, the character is read from UCA0RXBUF.
int uart_getchar(void)
{
int chr = -1;
if (IFG2 & UCA0RXIFG) {
chr = UCA0RXBUF;
}
return chr;
}
The next function to implement is uart_putchar, to print a character
to the console. Before transmitting we have to check that the transmit
buffer is ready – it has completed the previous transmission – by
reading the transmit interrupt flag IFG2[UCA0TXIFG]. When the interrupt
flag is set, the USCI module is ready for more data. It is cleared
automatically by the hardware when the data is put into the transmit
buffer UCA0TXBUF.int uart_putchar(int c)
{
/* Wait for the transmit buffer to be ready */
while (!(IFG2 & UCA0TXIFG));
/* Transmit data */
UCA0TXBUF = (char ) c;
return 0;
}
Note, that this function can return before the transmission has
completed. This is efficient in the sense that while the UART is pushing
out the data, the CPU has some time to get the next piece of data ready
or perform some other task. There is even more efficient possibilities
using interrupts, but we’ll cover that in a later lesson.The final function is uart_puts, which is really just an extension of uart_putc that can print a string rather than individual characters.The implementation is exactly the same as uart_putc, except we iterate through the string until NULL is found, which indicates the end of the string.
int uart_puts(const char *str)
{
int status = -1;
if (str != NULL) {
status = 0;
while (*str != '\0') {
/* Wait for the transmit buffer to be ready */
while (!(IFG2 & UCA0TXIFG));
/* Transmit data */
UCA0TXBUF = *str;
/* If there is a line-feed, add a carriage return */
if (*str == '\n') {
/* Wait for the transmit buffer to be ready */
while (!(IFG2 & UCA0TXIFG));
UCA0TXBUF = '\r';
}
str++;
}
}
return status;
}
There is one additional feature that I like to add for robustness.
When writing to the terminal in Linux, using ‘\n’ to create a new line
is valid. However, it depends on the terminal settings and may not
always be the case. The character ‘\n’ is line feed character. The
terminology derives from the good old days of typewriters, which when
you press enter, the roller would move the paper up one line. However,
the head also has to return back to the start (left side) of the page.
This is called a carriage return, whose ASCII character representation
is ‘\r’. These two characters together make what is today commonly
called a newline, which we do all the time by pressing the enter key. In
a terminal emulator however, such as Tera Term or minicom, they must
both be received (this can be sometimes be disabled), otherwise the text
will continue from the same position on the next line. For example,
“HellonWorldn” would display like this:
To avoid having to use “\n\r” everywhere, we can make this function handle both, by checking if the current character is a line feed and automatically adding a carriage return.
It is important to note, we prefixed all these functions with uart_ not only because they are part of the UART API, but because we do not want to conflict with the standard C library routines. Depending on how the library is implemented, you may be able to override some of the functions, but it can be unsafe and unpredictable. If you really want to write a custom standard C library, there are linker options which can tell gcc to not include them. This means however that none of the standard header files are accessible, and therefore must all be redefined in your software.
The UART driver must now be integrated with our existing application. First we need to add the initialization to the board.c file. In addition, the pin muxing of P1.1 and P1.2 must be configured to USCI TX and RX. Below is an excerpt from the board_init function.
/* Set P1.3 interrupt to active-low edge */
P1IES |= 0x08;
/* Enable interrupt on P1.3 */
P1IE |= 0x08;
/* Configure P1.1 and P1.2 for UART (USCI_A0) */
P1SEL |= 0x6;
P1SEL2 |= 0x6;
/* Global interrupt enable */
__enable_interrupt();
watchdog_enable();
/* Initialize UART to 9600 baud */
config.baud = 9600;
if (uart_init(&config) != 0) {
while (1);
}
Next we can start modifying the main loop to create our menu. The
implementation of the menu isn’t all that important so we won’t go into
much detail, but if you have any questions about it feel free to ask.
The important thing is to understand how the UART is being accessed.To build a menu, the API defined in include/menu.h provides a structure called menu_item which contains the text and the callback of the each selection.
struct menu_item
{
const char *text;
int (*handler)(void);
};
The caller creates a list of menu items representing with the desired
options and callbacks. It is best to create this array as a static
const, as typically we do not want it to be modified. Then the array is
passed into the function menu_init in src/menu.c, which initializes the
menu. This function will also display the menu.void menu_init(const struct menu_item *menu, size_t count)
{
/* Limit menu size to 9 options */
if (count < 9) {
count = 9;
}
_current_menu = menu;
_current_menu_size = count;
display_menu();
}
To read the user input and make a selection, menu_run can be invoked.
The function does not block, meaning that if there is no user input, it
will return immediately. This is required for our application because
we don’t want the menu to block all other functionality. Internally, the
function calls uart_getchar to read the characters received from the
UART. It accepts numbers only, and if the enter key is pressed, it will
determine if the value entered is within the limits of the menu and will
execute the callback. Whenever a character is received, it must be
echoed back to the console, so that the user can see what was typed.
Otherwise, it will feel like they are typing into the abyss.void menu_run(void)
{
static unsigned int value = 0;
int c = uart_getchar();
if ((c >= '0') && (c <= '9')) {
value *= 10;
value += c - '0';
uart_putchar(c);
} else if ((c == '\n') || (c == '\r')) {
if ((value > 0) && (value <= _current_menu_size)) {
/* Invoke the callback */
if (_current_menu[value - 1].handler != NULL) {
uart_puts("\n");
if (_current_menu[value - 1].handler() != 0) {
uart_puts("\nError\n");
}
}
} else {
uart_puts("\nInvalid selection\n");
}
display_menu();
value = 0;
} else {
/* Not a valid character */
}
}
One more API is provided more as a helper function for the callback
functions, menu_read_uint. Often a menu option itself will require user
input, and in our case we want to be able to input a frequency for the
blinking LED. Unlike menu_run, this functions is blocking but takes care
of petting the watchdog. It will return the unsigned integer value
enter by the user.unsigned int menu_read_uint(const char *prompt)
{
unsigned int value = 0;
uart_puts(prompt);
while (1) {
int c = uart_getchar();
watchdog_pet();
if ((c >= '0') && (c <= '9')) {
value *= 10;
value += c - '0';
uart_putchar(c);
} else if ((c == '\n') || (c == '\r')) {
uart_puts("\n");
break;
} else {
/* Not a valid character */
}
}
return value;
}
To put it all together, we can take a look at main.c. First we build
the menu in the global namespace with a single option, change the
frequency of the blinking LED.static const struct menu_item main_menu[] =
{
{"Set blinking frequency", set_blink_freq},
};
Then in our main() function we print out a welcome message using the
uart_write() function. Next the menu is initialized with our main menu,
and it will be printed out the terminal. Note that we use the macro
ARRAY_SIZE here as well to pass in the number of menu items.In the existing while loop, we make a call to menu_run in order to continuously monitor for user input. When the user selects option 1, the callback function defined in the main menu, set_blink_freq, will be invoked.
static int set_blink_freq(void)
{
const unsigned int value = menu_read_uint("Enter the blinking frequency (Hz): ");
if (value > 0) {
_timer_ms = 1000 / value;
}
return (value > 0) ? 0 : -1;
}
The value returned from menu_read_uint is validated to make sure
there is no dividing by zero. Then the frequency entered is divided by
1000 to get the timer timeout period in ms. The value is stored in a new
global variable called _timer_ms. Even though this variable is global,
we do not have to disable interrupts as we have done with the timers in
the last lesson. It is only modified by the user in the callback, and
read by the main while loop. Therefore, the access is sequential and
does not require a critical section or a volatile identifier either. In
addition, it is important to see how the variable is being used to set
the timer period. The timer API only permits the period to be set when
it is created, therefore to change the blinking frequency, the user has
to stop and restart the the timer using the push button.int main(int argc, char *argv[])
{
(void) argc;
(void) argv;
if (board_init() == 0) {
int timer_handle = -1;
uart_puts("\n**********************************************");
uart_puts("\nSimply Embedded tutorials for MSP430 Launchpad");
uart_puts("\nsimplyembedded.org");
uart_puts("\nVersion: 0.9");
uart_puts("\n"__DATE__);
uart_puts("\n**********************************************");
menu_init(main_menu, ARRAY_SIZE(main_menu));
while (1) {
watchdog_pet();
menu_run();
/**
* If blinking is enabled and the timer handle is
* negative (invalid) create a periodic timer
*/
if (_blink_enable != 0 ) {
if (timer_handle < 0) {
timer_handle = timer_create(_timer_ms, 1, blink_led, NULL);
}
} else {
if (timer_handle != -1) {
timer_delete(timer_handle);
timer_handle = -1;
}
}
}
}
return 0;
}
Note how the timer_create function now takes the variable _timer_ms rather than the hardcoded value 500 as it did previously.The setup
Since UART is relatively slow, it is sometimes implemented bit-banged using standard GPIOs rather than with the USCI peripheral as we have. On the Launchpad, TI has given us the option to use either software UART (bit-banging) or the hardware UART (USCI) with some jumper settings on the board. They made some changes between rev 1.4 and 1.5 to facility this functionality, so the jumper settings between the two are different. If your board is older than rev 1.4, I suspect it will be the same, but if not please inform me.
In both cases, the board is shipped with the jumpers set for software UART, therefore we have to change them. On the rev 1.4 boards, you will need some jumper cables, since you need to cross the pins like this:
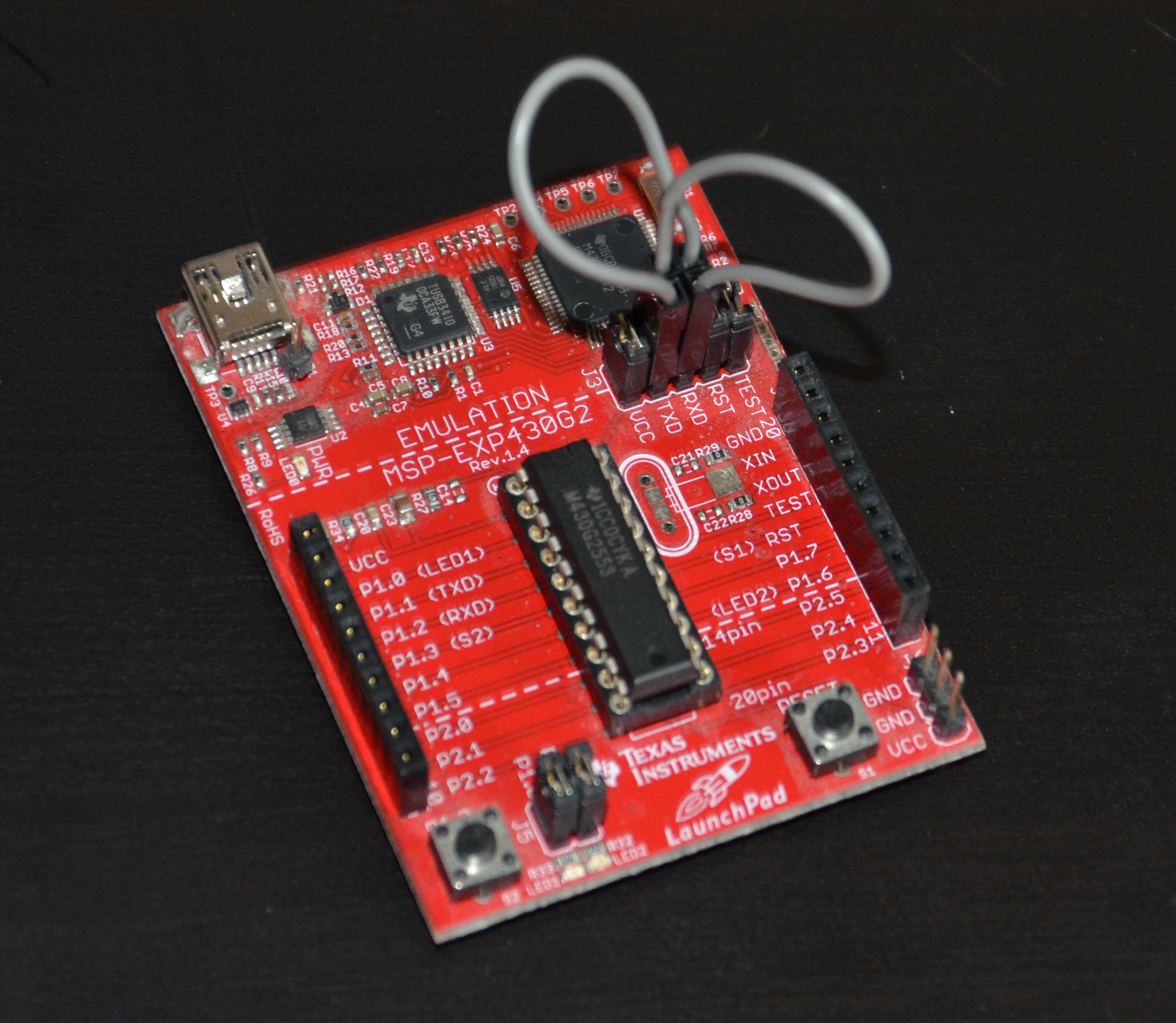
On rev 1.5, they made it a bit easier and you simply need to rotate the two jumpers 90 degrees as follows:
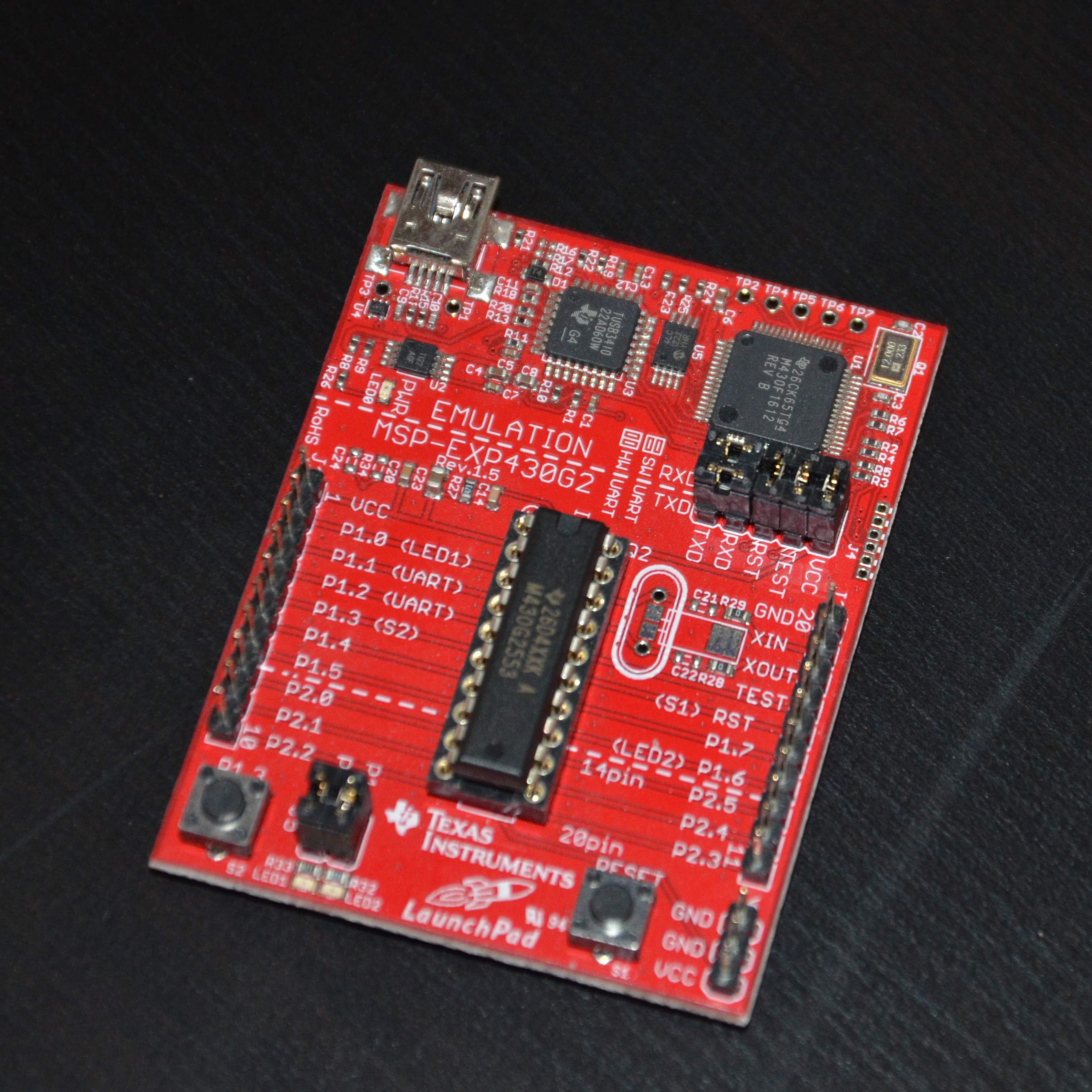
Now your hardware should be ready to go. When you connect your Launchpad to the USB port on your computer, the device will enumerate as two classes: HID (human interface device) required for the programming and debugging, and CDC (communications device class) for the UART. In Windows, if you check in the device manager, you will see that the device is not found. This is normal, and TI supplies drivers for both channels (more on this later). On Linux (running as a host), the CDC channel comes up as /dev/ttyACMx (where x is an integer value) and can be read directly as if it were a regular serial port. However, connect the debugger using mspdebug, and now you lost your serial connection. The way the debugger and serial port were implemented on the Launchpad is somewhat flawed. What they tried to do is valid, but for some reason it is unfortunately quite flakey, especially in Linux. Only one can run at a time, which is a bit inconvenient, but what’s worse the CDC channel doesn’t work at all in VirtualBox. I tried for days recompiling kernel modules, different setups etc… with no luck. There are few options/workarounds which worked for me and you can decide which is best for you.
Option 1: Running in a VM with Windows host using Tera Term in Windows for serial
If you have been following these tutorials from the beginning, you may have set up your environment as I have, a Windows host and Linux guest running in VirtualBox. Unfortunately, the workaround for this setup is the most clumsy of the options. I’m also not the biggest fan because I prefer minicom (and Linux) over Tera Term, but it is fairly reliable nonetheless. The other thing I don’t like about this option is that you have to install drivers on Windows. I will show you how to do it as cleanly as possible.
- Download the MSPWare package from TI’s website.Don’t donwload all of CCS, just MSPWare. I was going to make the drivers easily accessible, but its under export control so unfortunately that wasn’t an option. Install the package. It should create a new directory under your C drive called ‘ti’.
- Now open the device manager in Windows, and look for MSP430 Application UART. It should be under ‘Other Devices’ since Windows can’t find the driver
- Right click and select ‘Update Driver Software’, and in the prompt following, select ‘Browse my computer for driver software’
- In the textbox on the next page, type in C:timspMSPWare_2_00_00_41examplesboardsMSP-EXP430G2MSP-EXP430G2 Software ExamplesDrivers and click next
- Once the driver is installed, it should appear under the ‘Ports’ section, and should be assigned a COM port (mine is COM4 for example)
- Download and install Tera Term
- Open Tera Term and under the ‘Setup’ menu select ‘Serial’
- Set the COM port to match what showed in the Device Manager
- Set the baud rate to 9600
- Set data to 8 bit
- Set parity to none
- Set stop bits to 1
- Set flow control to none
- Save this setup as default by selecting ‘Save Setup’ under the ‘Setup’ menu
Option 2: Linux host environment
If you are following along with a Linux host, minicom is my serial terminal of choice. Minicom is all command line, so if you are not comfortable with that, then you can install putty from the repositories. If you choose to use minicom and are having problems setting it up, I can answer any questions you may have. Once you have your terminal installed, you can plug in the Launchpad and open up /dev/ttyACM0 (or whatever port yours came up as). You should see the serial output being printed at this time. Now if you want to use the debugger, close minicom and open mspdebug. You should be able to program and debug. If you want to go back to serial, you must close minicom, unplug the device, wait a few seconds and plug it back in again before opening minicom.
Option 3: Use an external UART to USB converter
The pitfall with both of the previous options is that you cannot use mspdebug and access the menu at the same time, making debugging difficult. This may not be an issue for now since the code provided should work without modification, however it is ideal to have this capability. To achieve this, you can use a UART to USB converter (this one from Sparkfun is cheap and easy to use) or serial to USB converter with the MAX3232 (the 3.3V compatible version of the MAX232 – see the bread boarded picture from above). With a UART to USB, you can simply remove the jumpers from the Launchpad for the TX and RX lines, and connect the device straight onto the headers using some jumper cables.
Testing the UART
Now that you have your device and PC all set up for UART, reset the device and take a look at the menu. We have only one option for now (we will add to this in the future), which will set the frequency of the blinking LED. Select this option and enter a frequency of 2Hz. From the code described earlier, we know that this only sets a variable containing the timer period. For it to take effect, you must use the push button to start the blinking. Now select the menu option again and change the frequency to 4Hz. Stop and restart the blinking. You should see the LED blink twice as fast. In the next lesson, we will look at improving our UART driver to handle receiving characters even when the CPU is busy doing other stuff.
Lesson 10: UART Receive Buffering
In the last lesson, we created a very simple UART driver which polls the peripheral for received data. As we learned with the push button back in lesson 6,
this is not the optimal solution for most drivers. Once we start adding
in more functionality to the main loop, it is possible that characters
may be missed because the CPU is busy doing other things. We can easily
simulate this scenario by adding a big delay into the the main loop –
say one second – by using the __delay_cyles function.
The solution is twofold: detect incoming data using interrupts rather than polling and then store each received character in a first-in-first out (FIFO) buffer. A FIFO is a type of buffer (or queue) in which the data enters and exits in the same the order. If the FIFO is full and there is another piece of data to enter, it is either dropped (the newest data is lost) or the oldest data in the FIFO is pushed out and discarded. There are different types of FIFOs so I won’t cover all the possible designs, but we will look at one in detail shortly. Using a FIFO to queue received data is very common. In fact, the UCA0RXBUF register can be considered a FIFO of depth 1 (depth of ‘n’ means ‘n’ elements fits in the FIFO) which drops the oldest data once full. The UCA0STAT[UCOE] field will be set if this condition, called an overrun error, occurs.
Some higher end MCUs provide a UART FIFO in hardware. However, even with hardware queuing, it may be optimal to implement a software queue in conjunction to provide more flexibility. In this tutorial we will implement on type FIFO which can be used for queuing all types of data.
Ring buffer basics
The type of FIFO we will be implementing is called a ring buffer, also known as a circular buffer. It is called a ring buffer because data can wrap around back to the beginning, provided there is space. Really it is just implemented as an array but the beginning of the queue does not have to start at the first element of the array, and the end does not necessarily end at the last element in the array. The start of the queue could begin somewhere in the middle of the array, wrap around the last element back to the beginning and end there. The start of the queue is where new data will be written to. The end of the queue contains the oldest data and is where the caller will read from. These are commonly referred to the head and tail respectively. Note these are just naming conventions for the sake of theory – their exact meaning is implementation specific as you will see later.
To help clarify this how the ring buffer works, lets take a look at some diagrams. Let’s say our ring buffer can hold 4 elements. When it is initialized, the head and tail are both at the first element.

There is no data in the ring buffer. In the next image, one element is added as indicated by the light blue box.

Data is inserted at the current head, and the head is incremented to the next element. Another key is pressed, and another character is entered.

And another…

And another…

And another… oh wait, the ring buffer is full! The head has wrapped around back to the position of the tail. If one more write occurs, the oldest data would be lost. Therefore, the next write would fail. So what if the application now reads a character from the ring buffer?

The tail increments and there is one free element in the ring buffer. Now one more character is added and fills the buffer again, but now the ring wraps around the array.

And around and around the data goes. But there is a catch. Do you see a potential implementation challenge with these diagrams? The head and tail are on the same element in two instances: when the buffer is empty and when the buffer is full. So how can you differentiate between the two? There are several ways to handle this issue. A common implementation to determine if the ring buffer is full is to keep track of the count of data. This means for every write the counter is incremented and for every read the counter is decremented. It is very easy to implement, however this approach has one major flaw. The write will be invoked from an interrupt and the read will be invoked from the application. Having a single variable to track the count would mean we MUST have a critical section in both functions. Going back to the lesson on timers, we learned that a critical section is necessary when a variable is accessed by more than one context. This means that while reading data out of the ring buffer, interrupts would have to be temporarily disabled. Although sometimes unavoidable, it is best to try and write code that will not require the use of critical sections. In the following section we will implement a ring buffer which addresses both of these concerns.
Implementing a lock-free ring buffer
Our implementation of the ring buffer will be generic enough so that we can use it for any type of data, not just characters. This means we have to know not only the number of elements in the ring buffer, but also the size of the elements. To start, let’s take a look at the rb_attr_t structure in the header file include/ring_buffer.h.
In the header file, there is typedef of the ring buffer descriptor rbd_t.



 (I use the underscore just for clarity)
(I use the underscore just for clarity)
Note that the 1 is left shifted by the number in the exponent. If one is subtracted from any power of two, the result will be a consecutive series of 1s from bit zero to bit ‘exponent – 1’.




If the the original value is logical AND’ed with this string of ones, the result will always be a zero for a power of two.




If the initial value was not a power of two, the result will always be non-zero.


A similar technique will be used to wrap the head and tail indices which we will look at shortly.
Now that all the arguments are validated, they are copied into the local structure and index is passed back to the caller as the ring buffer descriptor. The variable idx is also incremented to indicate the ring buffer is used. The value will now be RING_BUFFER_MAX so if the initialization function is called again, it will fail.
Before moving on to the rest of the public APIs, lets take a look at the two static helper functions: _ring_buffer_full and _ring_buffer_empty.
When the head and tail pointer reach their limits (for a 16 bit integer this will be at 65535) and overflow some binary trickery comes into play. The head overflows first but the tail is still a large value, so the difference between the two will be negative. However, this works to our advantage because we are using unsigned integers. The subtraction results in a very large positive value which can be used to obtain the actual difference between the two values at no extra cost. To demonstrate how this works, say for example we have two unsigned 8-bit values: 5 and 250 , the head and tail respectively. To determine if the ring buffer is full or empty, we must subtract the tail from the head:

Well that result is definitely more than 8 bits, so what happens with the most significant byte? So long as the result is also stored as an unsigned 8-bit value, the upper byte (MSB) will be discarded, or truncated. The result is therefore only assigned the bottom byte

This is the absolute difference between the head and the tail! In the case of our software, we are using size_t, which is 16 bits, but the principle is the same.
The next function is ring_buffer_put which adds an element into the ring buffer.
head % n_elem = element in ring buffer


The problem with the modulus is that division is expensive. It takes many operations and is actually implemented in software. Therefore, it is ideal to come up with a way to reduce this unnecessary overhead. It is for this reason the number of elements is restricted to a power of two. This allows us to take advantage of those rules we learned earlier to perform a modulus operation using only logical AND operator a simple subtraction. Subtracting one from any power of two results in a binary string of ones. Logical ANDing the result with any value will obtain the modulus. Taking the last example again, with a ring buffer which has eight elements and the head is 100 :


head & (n_elem -1) = element in ring buffer

The result is the same as above. The subtraction and the logical AND operation are both implemented in a single instruction each on pretty much every CPU, while the modulus requires many instructions to do the same. Therefore, using this trick optimizes the performance of the ring buffer.
Back to calculating the offset, we have only found the element in which we want to insert data into. However, since the size of the data is defined by the caller, the actual byte offset into the memory array can be calculated by taking the element and multiplying it by the size of each element in bytes. Once the data is copied into the ring buffer memory, the head is incremented.
The last function in this module is ring_buffer_get.
Using the ring buffer in the UART driver
Now that we understand how the ring buffer works, it must be integrated into the UART driver. First as a global in the file, the ring buffer descriptor_rbd and the ring buffer memory _rbmem must be declared.
In the initialization function uart_init, the ring buffer should be initialized by calling ring_buffer_init and passing the ring buffer attributes structure with each member assigned the values discussed. If the ring buffer initializes successfully, the UART module can be taken out of reset and the receive interrupt is enabled in IFG2.
One more thing that we have to modify is the makefile. When I started running this code the first time it was not working. For a while I was stumped. I copied it and compiled it for my PC and it ran fine. After some debugging, I figured out that all multiplications were returning an incorrect value. Further investigation showed that the compiler was, for some reason, trying to use the hardware multiplier that exists on higher end MSP430 devices but not on the MSP430G2553. Luckily there is a compiler flag ‘mhwmult’ which can be used to tell the compiler not to use the hardware multiplier by setting the flag to ‘none’. Now the CFLAGS variable should have the following definition:
Testing the ring buffer
Now that we have made all the necessary modifications, program the board and run the new code leaving in the one second delay. Try typing ‘1234’ again as we did at the beginning of the tutorial. You should see that although the characters are delayed, they are all received and in the correct order. Now our UART driver has some protection against dropping characters once the application become more busy.
watchdog_pet(); menu_run(); __delay_cycles(1000000);The menu_run function reads the UART input and is then delayed one second before checking for the next character. This delay is exaggerated but it demonstrates an important point. Compile the code with this delay and then run it. Try typing ‘1234’ quickly at the menu prompt. You will notice that characters are dropped, only one or two of the characters are echoed back. What happens here is each character received by the peripheral is placed into the UCA0RXBUF register. If the software does not read the data out of the register before the next character is received, the value in the register will be overwritten.
The solution is twofold: detect incoming data using interrupts rather than polling and then store each received character in a first-in-first out (FIFO) buffer. A FIFO is a type of buffer (or queue) in which the data enters and exits in the same the order. If the FIFO is full and there is another piece of data to enter, it is either dropped (the newest data is lost) or the oldest data in the FIFO is pushed out and discarded. There are different types of FIFOs so I won’t cover all the possible designs, but we will look at one in detail shortly. Using a FIFO to queue received data is very common. In fact, the UCA0RXBUF register can be considered a FIFO of depth 1 (depth of ‘n’ means ‘n’ elements fits in the FIFO) which drops the oldest data once full. The UCA0STAT[UCOE] field will be set if this condition, called an overrun error, occurs.
Some higher end MCUs provide a UART FIFO in hardware. However, even with hardware queuing, it may be optimal to implement a software queue in conjunction to provide more flexibility. In this tutorial we will implement on type FIFO which can be used for queuing all types of data.
Ring buffer basics
The type of FIFO we will be implementing is called a ring buffer, also known as a circular buffer. It is called a ring buffer because data can wrap around back to the beginning, provided there is space. Really it is just implemented as an array but the beginning of the queue does not have to start at the first element of the array, and the end does not necessarily end at the last element in the array. The start of the queue could begin somewhere in the middle of the array, wrap around the last element back to the beginning and end there. The start of the queue is where new data will be written to. The end of the queue contains the oldest data and is where the caller will read from. These are commonly referred to the head and tail respectively. Note these are just naming conventions for the sake of theory – their exact meaning is implementation specific as you will see later.
To help clarify this how the ring buffer works, lets take a look at some diagrams. Let’s say our ring buffer can hold 4 elements. When it is initialized, the head and tail are both at the first element.
There is no data in the ring buffer. In the next image, one element is added as indicated by the light blue box.
Data is inserted at the current head, and the head is incremented to the next element. Another key is pressed, and another character is entered.
And another…
And another…
And another… oh wait, the ring buffer is full! The head has wrapped around back to the position of the tail. If one more write occurs, the oldest data would be lost. Therefore, the next write would fail. So what if the application now reads a character from the ring buffer?
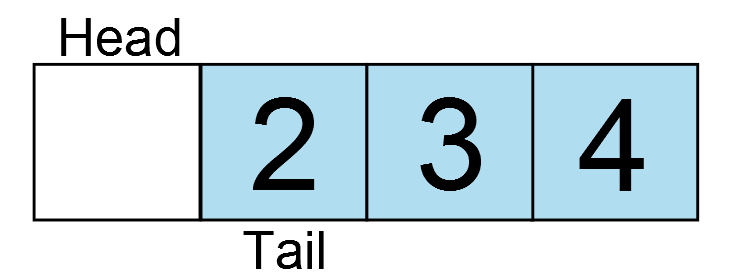
The tail increments and there is one free element in the ring buffer. Now one more character is added and fills the buffer again, but now the ring wraps around the array.
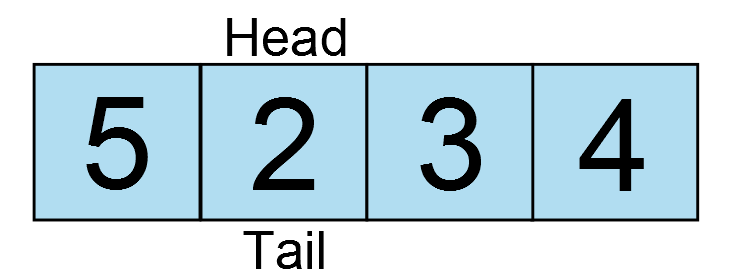
And around and around the data goes. But there is a catch. Do you see a potential implementation challenge with these diagrams? The head and tail are on the same element in two instances: when the buffer is empty and when the buffer is full. So how can you differentiate between the two? There are several ways to handle this issue. A common implementation to determine if the ring buffer is full is to keep track of the count of data. This means for every write the counter is incremented and for every read the counter is decremented. It is very easy to implement, however this approach has one major flaw. The write will be invoked from an interrupt and the read will be invoked from the application. Having a single variable to track the count would mean we MUST have a critical section in both functions. Going back to the lesson on timers, we learned that a critical section is necessary when a variable is accessed by more than one context. This means that while reading data out of the ring buffer, interrupts would have to be temporarily disabled. Although sometimes unavoidable, it is best to try and write code that will not require the use of critical sections. In the following section we will implement a ring buffer which addresses both of these concerns.
Implementing a lock-free ring buffer
Our implementation of the ring buffer will be generic enough so that we can use it for any type of data, not just characters. This means we have to know not only the number of elements in the ring buffer, but also the size of the elements. To start, let’s take a look at the rb_attr_t structure in the header file include/ring_buffer.h.
typedef struct {
size_t s_elem;
size_t n_elem;
void *buffer;
} rb_attr_t;
This structure contains the user defined attributes of the ring
buffer which will be passed into the initialization routine. The
structure contains the member variables s_elem – the size of each
element, n_elem – the number of elements and buffer – a pointer to the
buffer which will hold the data. The design of this structure means that
the user must provide the memory used by the ring buffer to store the
data. This is required because we don’t have memory allocation functions
readily available. Even if we did, it is commonly considered bad
practice to use dynamic memory allocation in embedded systems (i.e.
malloc, realloc, calloc, etc…).In the header file, there is typedef of the ring buffer descriptor rbd_t.
typedef unsigned int rbd_t;This descriptor will be used by the caller to access the ring buffer which it has initialized. Its is an unsigned integer type because it will be used as an index into an array of the internal ring buffer structure located in src/ring_buffer.c. Apart from the attributes we discussed in the previous paragraph, the head and tail are all that is required for this structure. Notice how the head and tail are both declared as volatile. This is because they will be accessed from both the application context and the interrupt context.
struct ring_buffer
{
size_t s_elem;
size_t n_elem;
uint8_t *buf;
volatile size_t head;
volatile size_t tail;
};
This structure is allocated as an array private to this file. The
maximum number of ring buffers available in the system is determined at
compile time by the hash define RING_BUFFER MAX, which for now has a
value of 1. The allocation of the ring buffer structure looks like this.static struct ring_buffer _rb[RING_BUFFER_MAX];The initialization of the ring buffer is straight forward.
int ring_buffer_init(rbd_t *rbd, rb_attr_t *attr)
{
static int idx = 0;
int err = -1;
if ((idx < RING_BUFFER_MAX) && (rbd != NULL) && (attr != NULL)) {
if ((attr->buffer != NULL) && (attr->s_elem > 0)) {
/* Check that the size of the ring buffer is a power of 2 */
if (((attr->n_elem - 1) & attr->n_elem) == 0) {
/* Initialize the ring buffer internal variables */
_rb[idx].head = 0;
_rb[idx].tail = 0;
_rb[idx].buf = attr->buffer;
_rb[idx].s_elem = attr->s_elem;
_rb[idx].n_elem = attr->n_elem;
*rbd = idx++;
err= 0;
}
}
}
return err;
}
First we check that there is a free ring buffer, and that the rbd and
attr pointers are not NULL. The static variable ‘idx’ counts the number
of used ring buffers. The second conditional statement verifies that
the element size and buffer pointer are both valid. The final check is
performed to test that the number of element is an even power of two.
Enforcing this will permit us to make optimizations in the code which we
will discuss shortly. To verify n_elem is a power of two, there is a
trick which takes advantage of the binary number system. Any value which
is a power of two will have only one ‘1’ in it’s binary representation.
For example: (I use the underscore just for clarity)Note that the 1 is left shifted by the number in the exponent. If one is subtracted from any power of two, the result will be a consecutive series of 1s from bit zero to bit ‘exponent – 1’.
If the the original value is logical AND’ed with this string of ones, the result will always be a zero for a power of two.
If the initial value was not a power of two, the result will always be non-zero.
A similar technique will be used to wrap the head and tail indices which we will look at shortly.
Now that all the arguments are validated, they are copied into the local structure and index is passed back to the caller as the ring buffer descriptor. The variable idx is also incremented to indicate the ring buffer is used. The value will now be RING_BUFFER_MAX so if the initialization function is called again, it will fail.
Before moving on to the rest of the public APIs, lets take a look at the two static helper functions: _ring_buffer_full and _ring_buffer_empty.
static int _ring_buffer_full(struct ring_buffer *rb)
{
return ((rb->head - rb->tail) == rb->n_elem) ? 1 : 0;
}
static int _ring_buffer_empty(struct ring_buffer *rb)
{
return ((rb->head - rb->tail) == 0U) ? 1 : 0;
}
Both calculate the difference between the head and the tail and then
compare the result against the number of elements or zero respectively.
You will notice that in the subsequent functions, the head and tail are
not wrapped within the bounds of the ring buffer as you might expect
from the diagrams above. Instead they are incremented and wrap around
automatically when they overflow. This is a ‘feature’ of C (note this
only applies to unsigned integers) and saves us from performing an
additional calculation each time the function is called. It also allows
us to calculate the number of elements currently in the ring buffer
without any extra variables (read no counter = no critical section).
When the difference between the two is zero, the ring buffer is empty.
However, since the head and tail are not wrapped around n_elem, so long
as there is data in the ring buffer, the head and tail will never have
the same value. The ring buffer is only full when the difference between
the two is equal to n_elem.When the head and tail pointer reach their limits (for a 16 bit integer this will be at 65535) and overflow some binary trickery comes into play. The head overflows first but the tail is still a large value, so the difference between the two will be negative. However, this works to our advantage because we are using unsigned integers. The subtraction results in a very large positive value which can be used to obtain the actual difference between the two values at no extra cost. To demonstrate how this works, say for example we have two unsigned 8-bit values: 5 and 250 , the head and tail respectively. To determine if the ring buffer is full or empty, we must subtract the tail from the head:
Well that result is definitely more than 8 bits, so what happens with the most significant byte? So long as the result is also stored as an unsigned 8-bit value, the upper byte (MSB) will be discarded, or truncated. The result is therefore only assigned the bottom byte
This is the absolute difference between the head and the tail! In the case of our software, we are using size_t, which is 16 bits, but the principle is the same.
The next function is ring_buffer_put which adds an element into the ring buffer.
int ring_buffer_put(rbd_t rbd, const void *data)
{
int err = 0;
if ((rbd < RING_BUFFER_MAX) && (_ring_buffer_full(&_rb[rbd]) == 0)) {
const size_t offset = (_rb[rbd].head & (_rb[rbd].n_elem - 1)) * _rb[rbd].s_elem;
memcpy(&(_rb[rbd].buf[offset]), data, _rb[rbd].s_elem);
_rb[rbd].head++;
} else {
err = -1;
}
return err;
}
Since the size of each element is already known, the size of the data
does not need to be passed in. After validating the argument and
checking that the ring buffer is not full, the data needs to be copied
into the ring buffer. The offset into the buffer is determined by some
more tricky math. The buffer is just an array of bytes so we need to
know where each element starts in order to copy the data to the correct
location. The head index must be wrapped around the number of elements
in the ring buffer to obtain which element we want to write to.
Typically, a wrapping operation is done using the modulus operation. For
example, the offset could be calculated like this:const size_t offset = (_rb[rbd].head % _rb[rbd].n_elem) * _rb[rbd].s_elem;If we mod any value with the number of elements, the result will be a valid element within the range of the number of elements. For example, if head is 100, and the number of elements is 4, the modulus is 0, therefore we are inserting at element zero. If the number of elements was 8, then the result would be 4 and therefore we are copying the data to element 4.
head % n_elem = element in ring buffer
The problem with the modulus is that division is expensive. It takes many operations and is actually implemented in software. Therefore, it is ideal to come up with a way to reduce this unnecessary overhead. It is for this reason the number of elements is restricted to a power of two. This allows us to take advantage of those rules we learned earlier to perform a modulus operation using only logical AND operator a simple subtraction. Subtracting one from any power of two results in a binary string of ones. Logical ANDing the result with any value will obtain the modulus. Taking the last example again, with a ring buffer which has eight elements and the head is 100 :
head & (n_elem -1) = element in ring buffer
The result is the same as above. The subtraction and the logical AND operation are both implemented in a single instruction each on pretty much every CPU, while the modulus requires many instructions to do the same. Therefore, using this trick optimizes the performance of the ring buffer.
Back to calculating the offset, we have only found the element in which we want to insert data into. However, since the size of the data is defined by the caller, the actual byte offset into the memory array can be calculated by taking the element and multiplying it by the size of each element in bytes. Once the data is copied into the ring buffer memory, the head is incremented.
The last function in this module is ring_buffer_get.
int ring_buffer_get(rbd_t rbd, void *data)
{
int err = 0;
if ((rbd < RING_BUFFER_MAX) && (_ring_buffer_empty(&_rb[rbd]) == 0)) {
const size_t offset = (_rb[rbd].tail & (_rb[rbd].n_elem - 1)) * _rb[rbd].s_elem;
memcpy(data, &(_rb[rbd].buf[offset]), _rb[rbd].s_elem);
_rb[rbd].tail++;
} else {
err = -1;
}
return err;
}
It is essentially the same as ring_buffer_put, but instead of copying
the data in, it is being copied out of the ring buffer back to the
caller. Here however, the point at which the tail is incremented is key.
In each of the previous two functions, only the head or tail is
modified, never both. However, both values are read to determine the
number of elements in the ring buffer. To avoid having to use a critical
section, the modification to the head must occur after reading the
tail, and vise-versa. It is possible that an interrupt could fire right
before or during the memcpy. If the tail increments before the data is
copied out of the buffer and the buffer is full, ring_buffer_put would
see that there is room in the ring buffer and write the new data. When
the interrupt returns and the application regains context, the
overwritten data would be lost and instead the caller would get the
latest data or corrupted data. By incrementing the index only at the
end, even if an interrupt fires in the middle of the memcpy,
ring_buffer_put called from the ISR would see the current tail as still
being used and would not write into it.Using the ring buffer in the UART driver
Now that we understand how the ring buffer works, it must be integrated into the UART driver. First as a global in the file, the ring buffer descriptor_rbd and the ring buffer memory _rbmem must be declared.
static rbd_t _rbd; static char _rbmem[8];Since this is a UART driver where each character is expected to be 8-bits, creating an array of characters is valid. If 9 or 10 bit mode was being used, then each element should be a uint16_t. The ring buffer should be sized to avoid losing data, so given the system’s memory constraints and performance, it should be able to hold the worst case scenario number of elements. Determining the worst case can be a combination of educated guesses and trial and error. Often queuing modules contain statistics information so that the maximum usage can be monitored. This is something we can explore in a later lesson. Here the queue is sized to 8 elements. I think it is highly improbable number of characters anyone could possibly type 8 characters coherently in one second. It is also a power of two. Four characters would probably be sufficient but we plan for worst case scenario and four extra bytes won’t break the bank (for now).
In the initialization function uart_init, the ring buffer should be initialized by calling ring_buffer_init and passing the ring buffer attributes structure with each member assigned the values discussed. If the ring buffer initializes successfully, the UART module can be taken out of reset and the receive interrupt is enabled in IFG2.
...
if (i < ARRAY_SIZE(_baud_tbl)) {
rb_attr_t attr = {sizeof(_rbmem[0]), ARRAY_SIZE(_rbmem), _rbmem};
/* Set the baud rate */
UCA0BR0 = _baud_tbl[i].UCAxBR0;
UCA0BR1 = _baud_tbl[i].UCAxBR1;
UCA0MCTL = _baud_tbl[i].UCAxMCTL;
/* Initialize the ring buffer */
if (ring_buffer_init(&_rbd, &attr) == 0) {
/* Enable the USCI peripheral (take it out of reset) */
UCA0CTL1 &= ~UCSWRST;
/* Enable rx interrupts */
IE2 |= UCA0RXIE;
status = 0;
}
}
...
The second function that must be modified is uart_getchar. Reading
the received character out of the UART peripheral is replaced by reading
from the queue. If the queue is empty, the function should return -1 as
it did before.int uart_getchar(void)
{
char c = -1;
ring_buffer_get(_rbd, &c);
return c;
}
Finally, we need to implement the UART receive ISR. Open the header
file msp430g2553.h and scroll down to the interrupt vectors section
where you will find the vector named USCIAB0RX. The naming implies that
this interrupt is used by both USCI A0 and B0 modules. This just means
that we have to be extra careful in our ISR to respond only when the
appropriate status flag is set. The USCI A0 receive interrupt status can
be read from IFG2. If it is set, the flag should be cleared and the
data in the receive buffer pushed into the ring buffer using
ring_buffer_put.__attribute__((interrupt(USCIAB0RX_VECTOR))) void rx_isr(void)
{
if (IFG2 & UCA0RXIFG) {
const char c = UCA0RXBUF;
/* Clear the interrupt flag */
IFG2 &= ~UCA0RXIFG;
ring_buffer_put(_rbd, &c);
}
}
If the queue is full, the data will be lost since in the interrupt
needs to return as fast as possible. You should never perform a busy
wait here – that is looping until the pushing the data into the queue
finally succeeds. This would be acceptable only in the context of the
application.One more thing that we have to modify is the makefile. When I started running this code the first time it was not working. For a while I was stumped. I copied it and compiled it for my PC and it ran fine. After some debugging, I figured out that all multiplications were returning an incorrect value. Further investigation showed that the compiler was, for some reason, trying to use the hardware multiplier that exists on higher end MSP430 devices but not on the MSP430G2553. Luckily there is a compiler flag ‘mhwmult’ which can be used to tell the compiler not to use the hardware multiplier by setting the flag to ‘none’. Now the CFLAGS variable should have the following definition:
CFLAGS:= -mmcu=msp430g2553 -mhwmult=none -c -Wall -Werror -Wextra -Wshadow -std=gnu90 -Wpedantic -MMD -I$(INC_DIR)We are running a fairly old version of the compiler (I really have to do an update on building the toolchain) so maybe they have fixed it in a newer version, but that was a pretty nasty bug to track down. Nonetheless, using this flag is valid and explicit so we can leave it in either way.
Testing the ring buffer
Now that we have made all the necessary modifications, program the board and run the new code leaving in the one second delay. Try typing ‘1234’ again as we did at the beginning of the tutorial. You should see that although the characters are delayed, they are all received and in the correct order. Now our UART driver has some protection against dropping characters once the application become more busy.
Lesson 11: Timing Events
Back in lesson 8, we learned about the MSP430 timer module and
created a timer library which is being used to blink the LED. The first
capture/compare block of Timer_A1 is set to compare mode, meaning that
the timer ticks away and is compared against the user defined value in
TA1CCR0. When the two values are equal an interrupt fires, resets the
counter and invokes our timer library from the ISR. In this lesson, we
will learn how to configure the second capture/compare block in the same
timer to capture mode. In this mode, the timer can be triggered by a
configurable event (either hardware or software) such that when the
event is detected, the current timer value is copied to the TA1CCR1
register where it can be read by the software. This mode of operation
can be used to capture timestamps for events, or time the difference
between two events. We will use the capture mechanism to create a simple
stopwatch. The existing timer module will be updated to configure the
capture block and associated interrupts and a new menu option will be
added to control the stopwatch.
Configuring the timer capture block
Since we are reusing Timer_A1 from lesson 8, we will briefly review the configuration of the timer:
To implement a higher resolution stopwatch, we will use the existing _timer_tick (100ms) in conjunction with the capture feature of the timer module. The timer will still use the interval set in TA1CCR0 even though we will be configuring the second capture/compare block to capture mode. Therefore, the captured value, which will be saved by the hardware in TA1CCR1, will always be between 0 and 100ms. By combining the two values we can obtain millisecond resolution. The following code should be inserted at the end of timer_init (after enabling CCIE) in src/timer.c to initialize capture block 1:
You might be wondering why we need the interrupt at all when the code could just initiate a capture and poll until it is done. Initially I thought this would be simplest implementation, however I later determined that it opens the door to a potential race condition. Remember that even while the capture is occurring, the timer is still running. It is possible that the timer reaches TA1CCR0 and the compare interrupt fires. If this happens, the _timer_tick variable will increment and would not be representative of the the value exactly when the capture occurred. Therefore, no matter when the software reads the _timer_tick, it is at risk of obtaining an incorrect value. By using the capture interrupt, the code will enter the ISR which ensures that the compare interrupt won’t fire until the ISR is complete. During this time the value of _timer_tick and the captured value can be stored for processing later.
Before jumping into the capture routine, we will define a new structure used to store the time.
When the capture is complete (_capture_flag is set), the value from _capture_tick can be converted to milliseconds by multiplying by 100. Then, the _capture_ta1ccr1 can be converted to milliseconds by multiplying by 2 (remember the timer period is 2 microseconds) and then dividing by 1000. There is a very important concept here that must be well understood. Either of these calculations could result in an integer overflow if the value is sufficiently large. In the first calculation, the _capture_tick only needs to be 655 or greater (just over a minute) before multiplying by 100 would result in an integer which does not fit in 16 bits. Similarly, multiplying _capture_ta1ccr1 by 2 would cause an overflow when the value is above 32767. You might be wondering why not divide by 1000 first in order to avoid this overflow. Well, that could impact the accuracy of the calculation. Let’s quickly take a look at how this can happen. Let say we have 23593 in _capture_ta1ccr1. Multiply by two and divide by 1000 using a calculator and the result is 47.186, which represented as an integer would result in 47ms – only 0.186ms of error. Now turn that calculation around and divide by 1000 first. The result of the division is 23.593, which gets truncated to 23 since it is an integer value. Then multiply by 2 to obtain the millisecond value of 46 – over 1 millisecond of error. Ok, so its really not much error compared to the reaction time of the person controlling the stopwatch, but it’s a principle you have to be aware of when performing calculations.
So how do we address these integer overflows? One solution is to cast the 16-bit integer to a 32-bit integer. The MSP430 does not have native support for 32-bit integers, however the compiler has functions in it’s math libraries which can handle 32-bit multiplication, division, etc… There may be a substantial performance impact, but since these calculations are not time sensitive the accuracy takes precedent. To correctly perform these calculations, we declare the variable ‘ms’ where the result will be stored as a uint32_t, which is guaranteed to be 32 bits wide. Then every time the 16-bit variable is used, it must be casted to a uint32_t as well. If there is a calculation with more than a single operation, the intermediate value may overflow as well. Remember the CPU can only perform one calculation at a time. By casting to uint32_t immediately before the variable in question each time it is used, you are telling the compiler that even the intermediate value should be stored as 32 bits, otherwise it will default to the size of the variable being multiplied (16 bits). Casting the whole expression at the beginning for example:
Now that the total number of milliseconds is calculated and stored as a 32-bit unsigned integer, the value can be divided into seconds and milliseconds to fill the time structure. Finally, the _capture_flag is cleared so the next time the function is called it will be initialized correctly.
The last modification to the timer module is the ISR. We need to implement a new ISR because only capture/compare block 0 is serviced by the existing interrupt. The remaining interrupts are all handled by the TAIV interrupt/register.
Adding the stopwatch to the menu
The stopwatch will be implemented using the menu. Although the capture module does have the ability to use hardware events to trigger the capture, we do not have any free buttons which are connected to the supported pins. Instead, we are using a software initiated capture which will be triggered by a key press. Pressing any key will take the first capture, and pressing any key again will take the second capture. The difference between the two captures is the result of the stopwatch.
First lets add a new add a new menu option in the main menu called ‘stopwatch’:
Once we have obtained the result, it can be displayed to the user. The seconds field is an unsigned integer (16 bits) and therefore has a limit of 65535, meaning we need a maximum of 5 digits before the decimal. Since the remainder is in milliseconds, it will require a maximum of 3 digits. The array of characters time_str is sized to accommodate these values when converted to ASCII as well as the colon separator. In each case, starting from the least significant digit and working up, the value can be converted to ASCII by taking the modulus 10 and adding it to the ASCII value of ‘0’. Then the value is divided by 10 to get the next digit and the process is repeated until it can’t be divided any further. As an example, say you want to display the value 53:
53 % 10 = 3
3 + ‘0’= ‘3’
53 / 10 = 5
5 % 10 = 5
5 + ‘0’ = ‘5’
5 / 10 = 0
And now that the value is 0 we stop. The ASCII characters are stored in time_str starting from the least significant digit and moving up. Displaying the ASCII characters in reverse order gives “53”. The same procedure is repeated for the milliseconds value and the string is then printed out to the console so the user can see the result.
Possible sources of error and relationship tor requirement and design
It is important when you design a system to identify any potential sources of error and evaluate them in order to ensure that the design meets your requirements. In the case of the stopwatch, the implementation should be accurate enough such that any error is negligible compared to the error of human reaction time, which as mentioned earlier, is in the hundreds of milliseconds range.
I can identify three potential sources of error, and will justify that the amount of error introduced is negligible.
Configuring the timer capture block
Since we are reusing Timer_A1 from lesson 8, we will briefly review the configuration of the timer:
- the timer module is clocked at MCLK/2 = 500000Hz
- the timer module set to ‘up’ mode
- TA1CCR0 is set to 50000 cycles which results in an interval of 100ms
- each timer interval triggers an interrupt which increments the _timer_tick variable
To implement a higher resolution stopwatch, we will use the existing _timer_tick (100ms) in conjunction with the capture feature of the timer module. The timer will still use the interval set in TA1CCR0 even though we will be configuring the second capture/compare block to capture mode. Therefore, the captured value, which will be saved by the hardware in TA1CCR1, will always be between 0 and 100ms. By combining the two values we can obtain millisecond resolution. The following code should be inserted at the end of timer_init (after enabling CCIE) in src/timer.c to initialize capture block 1:
TA1CCTL1 = CM_3 | CCIS_2 | SCS | CAP | CCIE;This line of code sets the second capture/compare block to capture mode. The trigger is configured to be software initiated. The capture can be set to synchronous or asynchronous mode. Synchronous mode means that the capture will occur on the next clock cycle, i.e. the capture is synchronous with the clock. An asynchronous capture means that the capture occurs immediately, potentially asynchronously to the clock. TI recommends using synchronous mode in order to avoid race conditions, so we will adhere to this recommendation. Finally, the interrupt is enabled so that the code can determine when the capture is complete.
You might be wondering why we need the interrupt at all when the code could just initiate a capture and poll until it is done. Initially I thought this would be simplest implementation, however I later determined that it opens the door to a potential race condition. Remember that even while the capture is occurring, the timer is still running. It is possible that the timer reaches TA1CCR0 and the compare interrupt fires. If this happens, the _timer_tick variable will increment and would not be representative of the the value exactly when the capture occurred. Therefore, no matter when the software reads the _timer_tick, it is at risk of obtaining an incorrect value. By using the capture interrupt, the code will enter the ISR which ensures that the compare interrupt won’t fire until the ISR is complete. During this time the value of _timer_tick and the captured value can be stored for processing later.
Before jumping into the capture routine, we will define a new structure used to store the time.
struct time
{
unsigned int sec;
unsigned int ms;
};
If we simply used an unsigned integer to store the captured time in
milliseconds, the measurable time would be limited to a duration of
65535ms – just over a minute – before an overflow of the 16-bit integer
occurs. This limitation wouldn’t make our stopwatch particularly useful.
There is the option of using a 32-bit integer instead which would
accommodate a much larger range. However, since it is not the native
type of the CPU, it would impose a significant performance impact on any
calculations which the application may have to perform using it.
Instead, we can separate the measurement into seconds and milliseconds.
This form also makes it simpler for the application to display time in a
standard format. The new function timer_capture will perform the
capture, calculate the total number of milliseconds since the timer
started, and then format the value to fit into the time structure which
will be passed back to the application.int timer_capture(struct time *time)
{
int err = -1;
if (time != NULL ) {
uint32_t ms;
/* Toggle the capture input select to trigger a capture event */
TA1CCTL1 ^= 0x1000;
/**
* Wait for the capture to complete
*/
while (_capture_flag == 0);
/* Save the number of ms from the timer tick */
ms = (uint32_t) _capture_tick * 100;
/* Save captured timer value in ms */
ms += ((uint32_t) _capture_taccr1 * 2) / 1000;
/* Save the number of milliseconds */
time->ms = ms % 1000;
/* Save number of seconds */
time->sec = ms / 1000;
/* Reset _capture_flag for next capture */
_capture_flag = 0;
err = 0;
}
return err;
}
The application is responsible for allocating the time structure and
passing it to the timer_capture function. If the pointer to the
structure is valid, the capture input select is toggled. Since the
capture is software initiated, the input needs to be manually toggled
between GND and Vcc. The capture block is configured to trigger on both
the rising and falling edges so each toggle will result in a capture.
Even though the capture interrupt is being used the function is
blocking, meaning that it must wait for the capture to complete before
returning. Therefore, it needs some mechanism to determine when the
capture has completed. At this point it is important to note the three
variables which have been added to the file:static volatile uint16_t _capture_tick = 0; static volatile uint16_t _capture_ta1ccr1 = 0; static volatile int _capture_flag = 0;The variable _capture_tick will be used to store the value of _timer_tick when the capture occurs while _capture_ta1ccr1 will store the value captured in TA1CCR1. The variable _capture_flag will indicate that the capture is complete. All of these will be set in the ISR which we will look at shortly.
When the capture is complete (_capture_flag is set), the value from _capture_tick can be converted to milliseconds by multiplying by 100. Then, the _capture_ta1ccr1 can be converted to milliseconds by multiplying by 2 (remember the timer period is 2 microseconds) and then dividing by 1000. There is a very important concept here that must be well understood. Either of these calculations could result in an integer overflow if the value is sufficiently large. In the first calculation, the _capture_tick only needs to be 655 or greater (just over a minute) before multiplying by 100 would result in an integer which does not fit in 16 bits. Similarly, multiplying _capture_ta1ccr1 by 2 would cause an overflow when the value is above 32767. You might be wondering why not divide by 1000 first in order to avoid this overflow. Well, that could impact the accuracy of the calculation. Let’s quickly take a look at how this can happen. Let say we have 23593 in _capture_ta1ccr1. Multiply by two and divide by 1000 using a calculator and the result is 47.186, which represented as an integer would result in 47ms – only 0.186ms of error. Now turn that calculation around and divide by 1000 first. The result of the division is 23.593, which gets truncated to 23 since it is an integer value. Then multiply by 2 to obtain the millisecond value of 46 – over 1 millisecond of error. Ok, so its really not much error compared to the reaction time of the person controlling the stopwatch, but it’s a principle you have to be aware of when performing calculations.
So how do we address these integer overflows? One solution is to cast the 16-bit integer to a 32-bit integer. The MSP430 does not have native support for 32-bit integers, however the compiler has functions in it’s math libraries which can handle 32-bit multiplication, division, etc… There may be a substantial performance impact, but since these calculations are not time sensitive the accuracy takes precedent. To correctly perform these calculations, we declare the variable ‘ms’ where the result will be stored as a uint32_t, which is guaranteed to be 32 bits wide. Then every time the 16-bit variable is used, it must be casted to a uint32_t as well. If there is a calculation with more than a single operation, the intermediate value may overflow as well. Remember the CPU can only perform one calculation at a time. By casting to uint32_t immediately before the variable in question each time it is used, you are telling the compiler that even the intermediate value should be stored as 32 bits, otherwise it will default to the size of the variable being multiplied (16 bits). Casting the whole expression at the beginning for example:
ms += (uint32_t) (_capture_ta1ccr1 * 2) / 1000;is wrong since the cast only applies the result of the complex calculation, not the single operation that results in the overflow.
Now that the total number of milliseconds is calculated and stored as a 32-bit unsigned integer, the value can be divided into seconds and milliseconds to fill the time structure. Finally, the _capture_flag is cleared so the next time the function is called it will be initialized correctly.
The last modification to the timer module is the ISR. We need to implement a new ISR because only capture/compare block 0 is serviced by the existing interrupt. The remaining interrupts are all handled by the TAIV interrupt/register.
__attribute__((interrupt(TIMER1_A1_VECTOR))) void timer1_taiv_isr(void)
{
/* Check for TACCR1 interrupt */
if (TA1IV &amp; TA1IV_TACCR1) {
/* Save timer values */
_capture_tick = _timer_tick;
_capture_ta1ccr1 = TA1CCR1;
/* Set capture flag */
_capture_flag = 1;
}
}
We check to be sure that the pending interrupt is for the correct
source – capture/compare block 1. When reading the TAIV register, keep
in mind that the highest priority pending interrupt is automatically
cleared when the TAIV register is read from or written to. In the ISR,
we save the current value of _timer_tick as well as the captured value.
No calculations are done in the interrupt handler to ensure it exits as
quickly as possible. Only the _capture_flag is set to indicate to the
software that the capture has completed and the saved values are the
most recent.Adding the stopwatch to the menu
The stopwatch will be implemented using the menu. Although the capture module does have the ability to use hardware events to trigger the capture, we do not have any free buttons which are connected to the supported pins. Instead, we are using a software initiated capture which will be triggered by a key press. Pressing any key will take the first capture, and pressing any key again will take the second capture. The difference between the two captures is the result of the stopwatch.
First lets add a new add a new menu option in the main menu called ‘stopwatch’:
static const struct menu_item main_menu[] =
{
{"Set blinking frequency", set_blink_freq},
{"Stopwatch", stopwatch},
};
The menu option invokes the following function:static int stopwatch(void)
{
struct time start_time;
struct time end_time;
uart_puts("\nPress any key to start/stop the stopwatch: ");
/* Wait to start */
while (uart_getchar() == -1) {watchdog_pet();}
if (timer_capture(&start_time) == 0) {
uart_puts("\nRunning...");
/* Wait to stop */
while (uart_getchar() == -1) {watchdog_pet();}
if (timer_capture(&end_time) == 0) {
size_t i;
char time_str[] = "00000:000";
unsigned int sec = end_time.sec - start_time.sec;
unsigned int ms = end_time.ms - start_time.ms;
/* Convert the seconds to a string */
for (i = 4; (i > 0) && (sec > 0); i--) {
time_str[i] = sec % 10 + '0';
sec /= 10;
}
/* Convert the milliseconds to a string */
for (i = 8; (i > 5) && (ms > 0); i--) {
time_str[i] = ms % 10 + '0';
ms /= 10;
}
/* Display the result */
time_str[sizeof(time_str) - 1] = '\0';
uart_puts("\nTime: ");
uart_puts(time_str);
}
}
return 0;
}
Using the uart_getchar function, we wait until a valid character is
received. While waiting, the watchdog must be pet. This may introduce
some error, but we know that the watchdog_pet function is small and
should execute in the order of microseconds (hint – use objdump to see
that the function is only three instructions). Therefore, we can assume
this delay will be negligible. When the first key press is received,
timer_capture is called to invoke the capture and the result is saved in
the start_time variable. This is repeated once more to obtain the
end_time. Then the difference between the two is calculated in terms of
seconds and milliseconds.Once we have obtained the result, it can be displayed to the user. The seconds field is an unsigned integer (16 bits) and therefore has a limit of 65535, meaning we need a maximum of 5 digits before the decimal. Since the remainder is in milliseconds, it will require a maximum of 3 digits. The array of characters time_str is sized to accommodate these values when converted to ASCII as well as the colon separator. In each case, starting from the least significant digit and working up, the value can be converted to ASCII by taking the modulus 10 and adding it to the ASCII value of ‘0’. Then the value is divided by 10 to get the next digit and the process is repeated until it can’t be divided any further. As an example, say you want to display the value 53:
53 % 10 = 3
3 + ‘0’= ‘3’
53 / 10 = 5
5 % 10 = 5
5 + ‘0’ = ‘5’
5 / 10 = 0
And now that the value is 0 we stop. The ASCII characters are stored in time_str starting from the least significant digit and moving up. Displaying the ASCII characters in reverse order gives “53”. The same procedure is repeated for the milliseconds value and the string is then printed out to the console so the user can see the result.
Possible sources of error and relationship tor requirement and design
It is important when you design a system to identify any potential sources of error and evaluate them in order to ensure that the design meets your requirements. In the case of the stopwatch, the implementation should be accurate enough such that any error is negligible compared to the error of human reaction time, which as mentioned earlier, is in the hundreds of milliseconds range.
I can identify three potential sources of error, and will justify that the amount of error introduced is negligible.
- The error from pressing the button on the PC keyboard to the reception by the MSP430
- There is some error introduced starting from when the user presses the key until the the UART transmission occurs, the duration of the UART transmission, and finally the interrupt latency at the MSP430. However, since a key press is required to both start and stop the stopwatch, some of these errors cancel out. Both the duration of the UART transmission and interrupt latency are deterministic and constant. Therefore, the only variable between the two key presses will be the PC. Since the PC is running order of magnitudes faster than our required accuracy, I would consider it safe to assume that the difference will not vary unless the PC resource usage spikes in between starting and stopping the timer. The best way eliminate this error is by using hardware switches connected to the capture input module. You could add buttons and configure the timer to trigger on one of the edges to achieve a more accurate measurement.
- The time delay between the software retrieval of a key press and the initialization of the capture
- Once stopwatch menu option has been invoked, the application waits for the user input. While it is waiting, the watchdog must be pet. This repeats in a loop until there is actually a character to retrieve – i.e. uart_getchar returns a positive value. When the key is pressed, the software could be at any point in this loop. Once the character is received and the software exits the loop, the timer_capture function which will add some additional overhead. However, again this error is deterministic and will be cancelled out. Therefore, there the only error is caused by the while loop. As I mentioned earlier, the watchdog_pet function is only 3 instructions, therefore even with the overhead of the branching instructions in the while loop, it is unlikely the error would ever reach close to 1 ms. That being said, the hardware solution in (1) would eliminate this error as well.
- Inaccuracy of calculations (rounding errors, etc…)
- The inaccuracy of calculations can play a role in some error. The measurements of the capture time are in microseconds and when performing conversions between microseconds and milliseconds, there will obviously be some loss of accuracy and hence error. However, the error will be on the order of microseconds up to a maximum of <1ms.
Lesson 12: I2C Basics
Often there is a need for multiple components on a board to
communicate with each other. Say for example, we have some type of
sensor and want to obtain the data from the sensor on the
microcontroller. The communication between them may not necessarily
require high speeds or a long range. One of the most common solutions to
solve this problem is I2C, or inter-integrated circuit. I2C is a serial
communication bus which uses two wires – one clock and one
[bidirectional] data line. It is a master-slave protocol, meaning there
must be at least one master and at least one slave on the bus. The
master always initiates transactions. The I2C specification was
originally created by Phillips and it defines both the physical layer –
the electrical signalling – and the protocol. The protocol makes use of
the hardware signalling to frame transactions which include an address,
read/write (R/W) bit and data. There exist other two wire interfaces
which are similar to or even derived from I2C such as SMBus, PMBus, etc…
Sometimes they can be compatible, but other times they are not. It is
best to ensure that the device you have is specifically I2C compatible.
Of the two signals on an I2C bus, one is the clock (SCL) and the other the data (SDA). The clock is always driven by the master, while the data is bidirectional, meaning it can be driven by either the master or the slave. Both signals are open drain and therefore high impedance (think open circuit) unless driven. A pull-up resistor is required on each line to pull it high in the idle state. When a device drives either of the lines, the open drain output pulls the line low. This design has the advantage that it can support bus arbitration without the chance of bus contention at the electrical level. In other words, if two devices are driving the line, they will not physically damage each other. This is especially useful in multi-master mode – which is defined by the standard – when there are multiple masters communicating with the same or different slaves on the same bus. Bus arbitration (which master has control of the bus) is supported by the physical interface using the open drain design.
The disadvantage however, is that the the bus speed is limited especially over distance and across multiple devices (the limiting factor is in fact capacitance – max 400pF). Therefore, the speed originally specified in the I2C bus standard was 100kHz. Almost all I2C devices will support this rate. However, because higher speeds are obviously desirable, fast mode was introduced to increase the supported rate up to 400kHz. Most devices support these two standard modes. There are higher speed modes as well, but the speed of the bus is determined by the slowest device on the bus, as well as the PCB design and layout.
The voltage levels of I2C are not defined by the specification. Instead it defines a high or low symbol relative to Vcc. This makes the bus flexible in the sense that devices powered with 5V can run I2C at 5V, while devices that run on 3.3V can communicate at 3.3V. The pitfall comes when devices are powered at different levels and need to communicate with each other. You cannot connect a 5V I2C bus to a 3.3V device. For this scenario the design would require a voltage level shifter on the I2C bus between the two devices. Voltage level shifters specifically designed for I2C applications are available.
The I2C protocol is defined by a set of conditions which frame a transaction. The start of a transmission always begins with a START condition during which the master leaves SCL idle (high) while pulling SDA low. The falling edge of SDA is the hardware trigger for the START condition. Now all the devices on the bus are listening. Conversely, a transaction is ended with a STOP condition, where the master leaves SCL idle and releases SDA so it goes high as well. In this case, the rising edge of SDA is the hardware trigger for the STOP condition. A STOP condition can be issued at any time by the master.


The R/W bit indicates to the slave whether the master will be – well – reading or writing to/from the slave device. It determines the direction of transmission of the subsequent bytes. If it is set to read (high) the slave will be transmitting, while if it set to write (low) the master will be transmitting.
The address is transmitted most significant bit first. A single bit is transmitted on SDA for each clock cycle on SCL – therefore transmitting a byte takes 8 clock cycles. After each byte is sent or received, the 9th clock cycle is reserved for the ACK/NACK (acknowledge/not acknowledge) symbol. Depending on the transaction, an ACK can be driven by the either the master or the slave. To signal an ACK, the device pulls SDA low on the 9th clock cycle, while the other device reads the state of the line. If it is low, it is interpreted as an ACK, if it left idle a NACK.

Next comes the data. The data transmitted or received can be as small as one byte up to as many bytes supported by the slave device. Typically a slave should NACK any data byte if it unable to accept any more or if it is busy. The transmitting device must stop transmitting upon receiving the NACK. Once the number of bytes requested has been written or read, the master completes the transaction with the STOP condition.
The standard defines three transaction formats:
Before we move onto implementing the driver, lets take a look at the slave device we will be communicating with. A very commonly used I2C device is the EEPROM. EEPROMs are typically used to store small amounts of data which don’t change very often such as serial number, hardware revision, manufacturing date, etc… The specific EEPROM we will be using is the Atmel AT24C02D, a 2Kb EEPROM with up to 1 million write cycles and can operate at speeds up to 1MHz. Keep in mind that memory devices are often advertised in terms of bits and not bytes, so 2Kb = 2 kilobits, which is (2048/8) 512 bytes – not that that much memory. Even though it has an endurance of 1 million write cycles (meaning the device is guaranteed to be able to perform at least 1 million writes before failing), writing to an EEPROM is quite slow so it is not really intended to be used to store data at runtime.
One of the reasons I choose this device is because it is available in a DIP package so it is easy to breadboard. Taking a look at the datasheet, we can see the package description and pin layout for the DIP.


Now let’s take a look at the device address in section 7 of the EEPROM datasheet. Since we left pins A0 – A2 floating, the lower 3 bits of the address will be 0b000. The datasheet specifies that the upper 4 bits will be 0xA (0b1010). This is the diagram provided:

Most I2C EEPROMs typically support the same types of transactions. The master device can either write to or read from the EEPROM. Writing to the EEPROM can take two forms: byte write and page write. Both require that the first data byte is the address to write to. For example, if the master wants to write to address 0x10, the first data byte will be 0x10. This address is stored in the EEPROMs internal current address register. The next data byte is the actual value to write to the EEPROM. Upon receiving this byte, the EEPROM should respond with an ACK. If the master than sends a STOP, this transaction is a byte write.


Reading data back from the EEPROM can be performed using one of 3 operations: current address read, random address read and sequential read. The current address read makes use of the EEPROM’s current address register to read the next address in the device. Like writes, each byte that is read increments the current address. However, instead of the address wrapping around a single page, it wraps across the whole device memory space. After one byte is read, if the master issues a NACK it is done reading data and it should subsequently send a STOP.


But what if we need to read from a specific address – which is most often the case? This is where message format 3 – combined format – comes into play with the random address read. First the master transmits the device address with the R/W bit set to write and one data byte containing the address to read from. Then it invokes a repeated START condition, changes direction to read and reads a single byte from the EEPROM.

I2C with the USCI Module
On the MSP430, the peripheral which implements I2C is the USCI module. In previous lessons, we looked at USCI_Ax which implements UART and SPI. The USCI_Bx module implements I2C and SPI.
Let us review the USCI module registers, specifically those fields which apply to I2C. Note that the same module is used to configure the MSP430 as a slave device, which we will cover in another lesson. Those fields have been marked as such.
The first configurations register, UCBxCTL0, USCI_Bx Control Register 0, contains the configuration for the protocol.

The second control register, UCBxCTL1, USCI_Bx Control Register 1,
configures the USCI module in terms of clocking and is used by the
driver to generate the START/STOP/ACK conditions.

The UCBxSTAT register contains the status of the module.

The SFR IFG2 contains the interrupt status bits for the USCI module.

Note that the undefined bits may be used by other modules depending
on the specific device. See the device data-sheet for more information.
Also, these fields are only for USCI_B0. If there is a second USCI_B
module (USCI_B1), equivalent fields are in registers UC1IE and UC1IFG
respectively.
Next we have the two baud rate control registers UCBxBR0 and UCBxBR1, the low and high bytes which form the prescaler value. Well see how to configure these later in the lesson.
The UCBxI2CSA is the slave address register. This is where the driver writes the address of the slave and the hardware will automatically shift the address left by one bit to accommodate the R/W bit.
To receive and transmit data there are two 8-bit registers, UCBxRXBUF and UCBxTXBUF respectively. To send data (not including the device address byte), data is written to UCBxTXBUF. This also clears UCAxTXIFG (transmit complete interrupt flag). Once the transmission is complete, UCAxTXIFG will be set. Similarly, when data is received on line, it is stored in UCAxRXBUF and UCAxRXIFG (receive interrupt flag) is set. The data is held in this register until it is read by software. When UCAxRXBUF is read by software, UCAxRXIFG is cleared.
Registers IE2 and UCBxI2COA, are only required for interrupt based drivers and slave configuration respectively and therefore will not be covered in this lesson.
Implementing the driver
Now that we have a high level understanding of the USCI module register set in I2C mode, let’s get coding. The I2C driver will be quite simple – it will not use interrupts at this point, only polling – not the best implementation for several reasons covered previously (blocking, power consumption, etc…) but it will suffice for learning the basics. First we will start off with a simple initialization routine which will live in a new source file src/i2c.c. This function will be responsible for configuring the features which will not change during runtime.
Next the clock source is selected to be SMCLK by setting UCSSELx to 0b10 in UCB0CTL1. Based on our clock module configuration, this means the USCI module will be running at 1MHz. With the source clock frequency configured, we can now setup the baud rate registers. The baud rate registers act a divider. We want the I2C bus to run at the standard 100kHz, so the divider value must be 1MHz / 100kHz = 1000000 / 100000 = 10. Therefore, we only need to set the low byte UCB0BR0 to 10. Now that everything is set up, finally we can take the USCI module out of reset by clearing UCSWRST in UCB0CTL1.
The initialization function should be called from board_init along with the rest of the hardware initialization. The pins need to be configured as well. From the pinout in the device datasheet for the MSP430G2553, SCL and SCK are located on P1.6 is and P1.7 respectively.

Let’s quickly verify how this covers all three I2C transaction formats.
Master transmitter slave receiver: The transmit buffer will have data and therefore the length should be non-zero. Data will be transmitted to the slave. The receive buffer will have a length of zero so master does not receive any data from the slave. Therefore immediately after the transmit is complete the STOP condition will be set.
Master receiver slave transmitter: The transmit buffer will have a length of zero. Therefore the transmit section of the function will be skipped. The length of the receive buffer should be greater than zero and therefore the master will read that number of bytes from the slave and then the STOP condition will be set.
Combined format: In this case both the transmit and receive buffers are greater than zero. Start by transmitting the required number of bytes. If no errors have occurred, a repeated START condition will be issued and the master will receive data from the slave. Once that is complete, the STOP condition will be set.
Based on this quick analysis, we can see that this function will provide the flexibility required to support all three I2C formats and therefore should support any I2C slave device.
Now let’s take a look at how the driver transmits data from the master to the slave.
Next, let’s take a look at how the master receives data from the slave device.
Finally, let’s take a look at how to handle the N/ACK from the slave device.
Using the driver to write and read data
Now that the driver is written, we can use it to store data to the EEPROM. Lets connect the breadboard to the MSP430 LaunchPad. Vcc and ground are straightforward – they are simply connected to the Vcc and ground pins on the LaunchPad. Pins P1.6 and P1.7 were configured for SCL and SDA respectively in board.c, so those pins can be connected to the EEPROM pins 6 and 5 on the breadboard.

To test out our driver, we will create two new menu options to read and write a single byte to the EEPROM. Currently they only support reading and writing one byte of data but they could be extended to ask the user for a length, or you can modify the code to change the size of the buffers.


The blue trace is SCL and the yellow trace SDA. We can see the first byte being transmitted is 0xA1 ((device address << 1) | write = (0x50 << 1) | 0x1 = 0xA1). On the 9th clock cycle, the SDA line is low, indicating that the EEPROM acknowledged the first byte. Then the address to read from is transmitted. Over the next 8 clock cycles, the SDA line toggles to 0b00000111 = 0x7. Again on the 9th clock cycle the EEPROM acknowledges. Since a read is a combined format transaction, both SDA and SCL are released high and the repeated START condition is issued. However, at the end of the first image, you can see both lines are held low for quite some time. This is called clock stretching and it is implemented by the hardware to delay the next byte in the transaction. In this case, the EEPROM is saying ‘wait for me to retrieve the data!’. When it is done, the master can continue clocking in the byte. Now the first byte is 0xA0 ((device address) << 1 | read = (0x50 << 1) | 0 = 0xA0). The EEPROM acknowledges once more and the next 8 clock cycles it transmits the data byte back to the master. In this case the data at address 0x7 was 0xFF – the ‘erased’ value of an EEPROM. The transaction ends with the STOP condition and both lines return to idle.
The write function is similar except that the user is also prompted for the value to write. The transmit buffer is pointed to the write_cmd array which has a length of 2 bytes, one for the address and the other for the data. Again, this could be increased in size to write more data. The receive buffer isn’t set but the length must be set to 0 to indicate to the driver there are no bytes to receive. If I now write the value 55 (0x37) to address 0x7, the transaction will look like this:

The first byte being transmitted is 0xA1 ((device address << 1) | write = (0x50 << 1) | 0x1 = 0xA1). On the 9th clock cycle, the SDA line is low, indicating that the EEPROM acknowledged the first byte. Then the address to write is transmitted. Over the next 8 clock cycles, the SDA line toggles to 0b00000111 = 0x7. Again on the 9th clock cycle the EEPROM acknowledges and then the master starts to transmit the data and we can see the SDA line toggle to 0b00110111 = 55. The transaction once again ends with the STOP condition and both lines return to idle.
This test code is not really how an EEPROM would be accessed in practice but at least we can test our interface, driver and hardware setup. In the next tutorial we will look more at reading and writing from the EEPROM and demonstrate some real-life use cases.
Of the two signals on an I2C bus, one is the clock (SCL) and the other the data (SDA). The clock is always driven by the master, while the data is bidirectional, meaning it can be driven by either the master or the slave. Both signals are open drain and therefore high impedance (think open circuit) unless driven. A pull-up resistor is required on each line to pull it high in the idle state. When a device drives either of the lines, the open drain output pulls the line low. This design has the advantage that it can support bus arbitration without the chance of bus contention at the electrical level. In other words, if two devices are driving the line, they will not physically damage each other. This is especially useful in multi-master mode – which is defined by the standard – when there are multiple masters communicating with the same or different slaves on the same bus. Bus arbitration (which master has control of the bus) is supported by the physical interface using the open drain design.
The disadvantage however, is that the the bus speed is limited especially over distance and across multiple devices (the limiting factor is in fact capacitance – max 400pF). Therefore, the speed originally specified in the I2C bus standard was 100kHz. Almost all I2C devices will support this rate. However, because higher speeds are obviously desirable, fast mode was introduced to increase the supported rate up to 400kHz. Most devices support these two standard modes. There are higher speed modes as well, but the speed of the bus is determined by the slowest device on the bus, as well as the PCB design and layout.
The voltage levels of I2C are not defined by the specification. Instead it defines a high or low symbol relative to Vcc. This makes the bus flexible in the sense that devices powered with 5V can run I2C at 5V, while devices that run on 3.3V can communicate at 3.3V. The pitfall comes when devices are powered at different levels and need to communicate with each other. You cannot connect a 5V I2C bus to a 3.3V device. For this scenario the design would require a voltage level shifter on the I2C bus between the two devices. Voltage level shifters specifically designed for I2C applications are available.
The I2C protocol is defined by a set of conditions which frame a transaction. The start of a transmission always begins with a START condition during which the master leaves SCL idle (high) while pulling SDA low. The falling edge of SDA is the hardware trigger for the START condition. Now all the devices on the bus are listening. Conversely, a transaction is ended with a STOP condition, where the master leaves SCL idle and releases SDA so it goes high as well. In this case, the rising edge of SDA is the hardware trigger for the STOP condition. A STOP condition can be issued at any time by the master.

I2C-bus specification and user manual (UM10204)
Immediately after the START, the master must send a single byte which
comprises of the device address and the read/write (R/W) bit. The
device address is the first 7 bits (the most significant bits) while R/W
is always bit 0.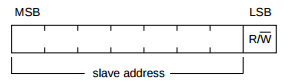
I2C-bus specification and user manual (UM10204)
It is important to remember that the address of a device is sometimes
provided already shifted left by one while the hardware may expect the
unshifted address. Other times the unshifted address may be provided,
but the hardware expects the shifted address. This is the most often
error when a device does not respond.The R/W bit indicates to the slave whether the master will be – well – reading or writing to/from the slave device. It determines the direction of transmission of the subsequent bytes. If it is set to read (high) the slave will be transmitting, while if it set to write (low) the master will be transmitting.
The address is transmitted most significant bit first. A single bit is transmitted on SDA for each clock cycle on SCL – therefore transmitting a byte takes 8 clock cycles. After each byte is sent or received, the 9th clock cycle is reserved for the ACK/NACK (acknowledge/not acknowledge) symbol. Depending on the transaction, an ACK can be driven by the either the master or the slave. To signal an ACK, the device pulls SDA low on the 9th clock cycle, while the other device reads the state of the line. If it is low, it is interpreted as an ACK, if it left idle a NACK.
I2C-bus specification and user manual (UM10204)
For the case when the device address is transmitted, the slave device
with the matching address should respond with an ACK. If there is no
device on the bus with a matching address, the master will receive a
NACK and should end the transaction.Next comes the data. The data transmitted or received can be as small as one byte up to as many bytes supported by the slave device. Typically a slave should NACK any data byte if it unable to accept any more or if it is busy. The transmitting device must stop transmitting upon receiving the NACK. Once the number of bytes requested has been written or read, the master completes the transaction with the STOP condition.
The standard defines three transaction formats:
- Master transmitter slave receiver – the master sends the first byte with the R/W bit cleared (write). All subsequent data bytes are transmitted by the master and received by the slave.
- Master receiver slave transmitter – the master sends the first byte with the R/W bit set (read). All subsequent data bytes are transmitted by the slave to the master.
- Combined format – effectively format 1 + 2 consecutively with no STOP condition in the middle. Instead of the STOP, there is what is called a repeated START condition which is exactly the same as a START but not preceded by a STOP.
Before we move onto implementing the driver, lets take a look at the slave device we will be communicating with. A very commonly used I2C device is the EEPROM. EEPROMs are typically used to store small amounts of data which don’t change very often such as serial number, hardware revision, manufacturing date, etc… The specific EEPROM we will be using is the Atmel AT24C02D, a 2Kb EEPROM with up to 1 million write cycles and can operate at speeds up to 1MHz. Keep in mind that memory devices are often advertised in terms of bits and not bytes, so 2Kb = 2 kilobits, which is (2048/8) 512 bytes – not that that much memory. Even though it has an endurance of 1 million write cycles (meaning the device is guaranteed to be able to perform at least 1 million writes before failing), writing to an EEPROM is quite slow so it is not really intended to be used to store data at runtime.
One of the reasons I choose this device is because it is available in a DIP package so it is easy to breadboard. Taking a look at the datasheet, we can see the package description and pin layout for the DIP.
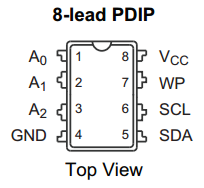
Atmel AT24C02D Datasheet (Atmel-8871E)
Pins 1 – 3 are the customizable address bits A0 – A2 for the I2C
device address. The top 4 bits (A3 – A6) are hard coded in the device
(we’ll see what these are shortly). Let’s say a hardware designer needs
three EEPROMs on the same I2C bus. If they all had the same address, all
the devices would respond to every request – obviously not desirable.
These pins allow the designer to change the lower three bits of the
address so up to eight of these devices can coexist on the same bus.
These pins are internally pulled to ground inside the device, so we can
leave them not connected unless you want to change the address (although
Atmel does recommend connecting them when possible). Pin 4 is the
ground pin, so that will be connected that to the ground rail. Pins 5
and 6 are the I2C lines – these will be connected to the MSP430’s SCL
and SDA pins which we will configure in software. However, as we learned
previously, they require pull-up resistors. Typical values for pull-up
resistors on an I2C bus range from 4.7kOhms to 10kOhms. We will use
4.7kOhms for this the breadboard circuit. Pin 7 is the write protect
signal. Because EEPROMs are often used to store static data that should
never change (i.e. a serial number or a MAC address), the designer can
ensure the contents cannot be overwritten by pulling the write protect
line high in hardware. Since we want to be able to write to the EEPROM,
we will tie this pin to ground. Finally pin 8, Vcc, will be connected to
the Vcc rail. With all this connected so far, the breadboard looks like
this: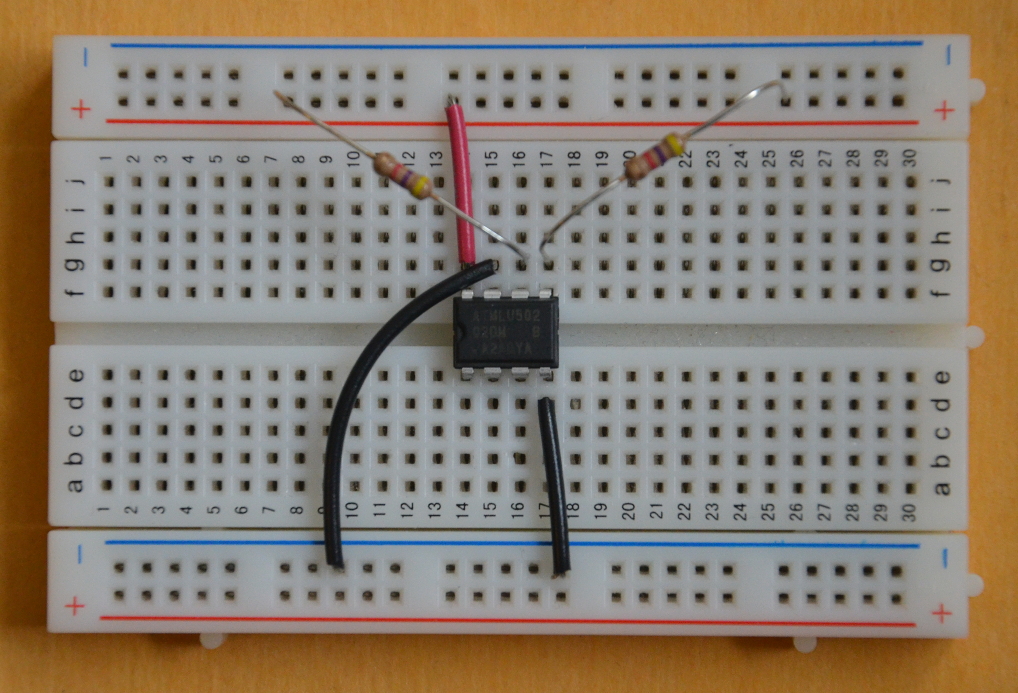
Now let’s take a look at the device address in section 7 of the EEPROM datasheet. Since we left pins A0 – A2 floating, the lower 3 bits of the address will be 0b000. The datasheet specifies that the upper 4 bits will be 0xA (0b1010). This is the diagram provided:

Atmel AT24C02D Datasheet (Atmel-8871E)
So your initial thought might be that we have to address the device
as 0xA0. Although this is what the datasheet implies and what is
physically transmitted, it is not technically correct. The actual device
address should not include the R/W bit. Therefore it should be shifted
right by 1 making it 0b1010000 = 0x50. This will be important when we
implement the driver.Most I2C EEPROMs typically support the same types of transactions. The master device can either write to or read from the EEPROM. Writing to the EEPROM can take two forms: byte write and page write. Both require that the first data byte is the address to write to. For example, if the master wants to write to address 0x10, the first data byte will be 0x10. This address is stored in the EEPROMs internal current address register. The next data byte is the actual value to write to the EEPROM. Upon receiving this byte, the EEPROM should respond with an ACK. If the master than sends a STOP, this transaction is a byte write.

Atmel AT24C02D Datasheet (Atmel-8871E)
The master also has the option to continue sending data to the slave,
until either the EEPROM responds with a NACK – indicating it is busy –
or a full page is written. This is called a page write.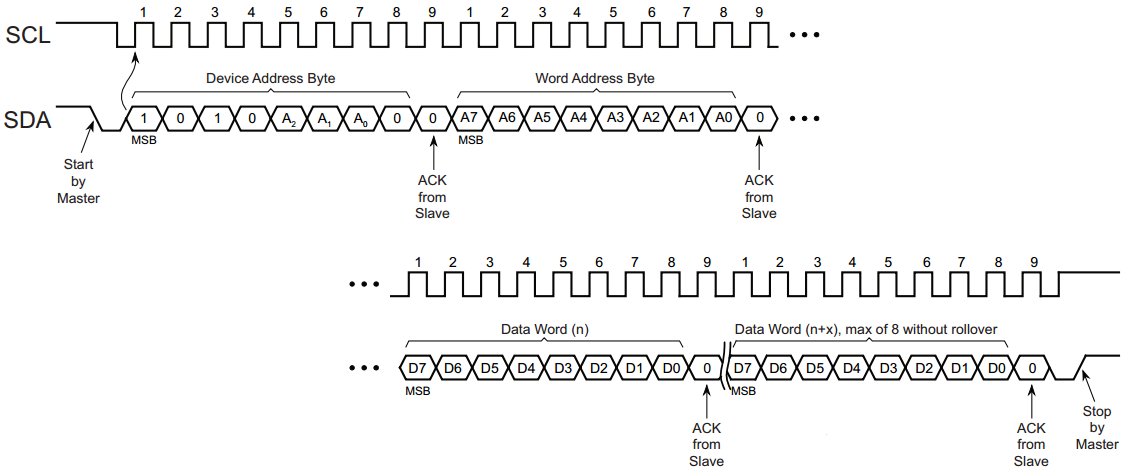
Atmel AT24C02D Datasheet (Atmel-8871E)
A page write need not transmit a full page however. It is up to a
page of data that can be written in a single transaction. In the case of
the AT24C02D, the page size is 8 bytes. After each byte is received,
the current address register in the EEPROM is incremented automatically.
However, only the 3 least significant bits in the address will
increment. If the master sends more than 8 bytes, those bits will wrap
around and the first address will be overwritten. It is therefore
important to limit each transaction to a maximum of 8 bytes and then a
new transaction with the updated address (incremented by 8 each time) be
initiated. Note that both byte write and page writes are of the
transaction format 1 – master transmitter slave receiver.Reading data back from the EEPROM can be performed using one of 3 operations: current address read, random address read and sequential read. The current address read makes use of the EEPROM’s current address register to read the next address in the device. Like writes, each byte that is read increments the current address. However, instead of the address wrapping around a single page, it wraps across the whole device memory space. After one byte is read, if the master issues a NACK it is done reading data and it should subsequently send a STOP.
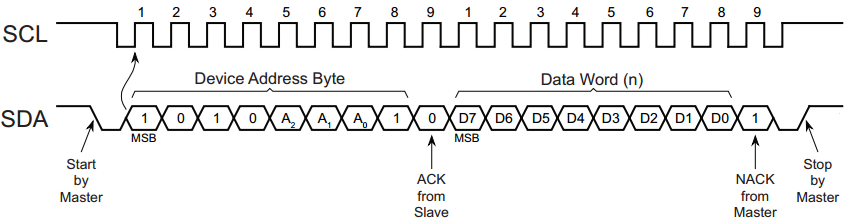
Atmel AT24C02D Datasheet (Atmel-8871E)
However, if the master responds with an ACK after the first data
byte, it will be expecting more data. This current address read becomes a
sequential read, which basically means that multiple bytes are read out
of the slave device. The master will continue to ACK each data byte
until it is done receiving the number of bytes it requires. On the last
data byte it must respond with a NACK and then a STOP condition.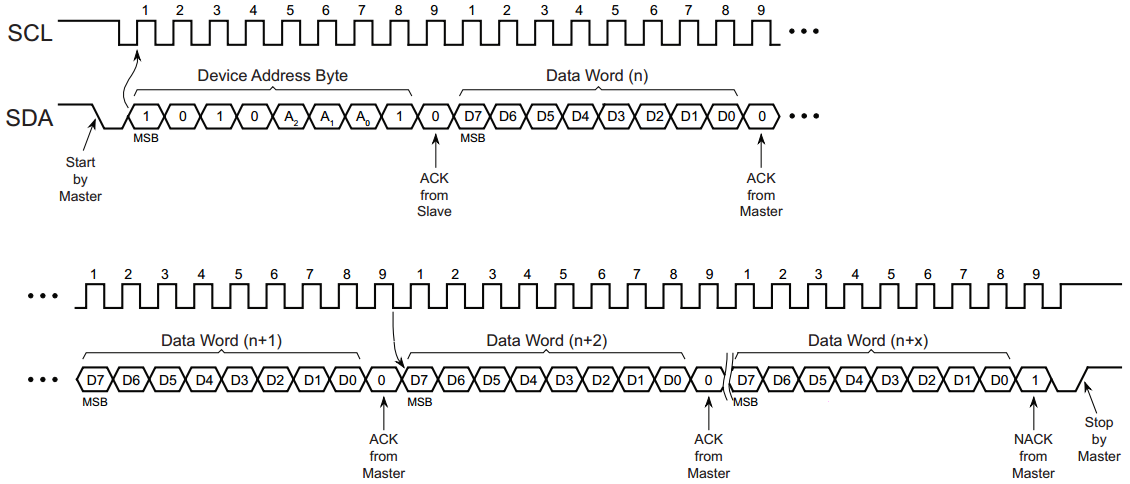
Atmel AT24C02D Datasheet (Atmel-8871E)
Notice that both current address read and sequential read (when
following a current address read) are in the transaction format 2 –
master receiver slave transmitter.But what if we need to read from a specific address – which is most often the case? This is where message format 3 – combined format – comes into play with the random address read. First the master transmits the device address with the R/W bit set to write and one data byte containing the address to read from. Then it invokes a repeated START condition, changes direction to read and reads a single byte from the EEPROM.

Atmel AT24C02D Datasheet (Atmel-8871E)
Sequential mode can also be applied to the random address read. Just
like with the current address read, instead of NACKing the first byte,
the master continues to ACK until it has read the desired number of
bytes.I2C with the USCI Module
On the MSP430, the peripheral which implements I2C is the USCI module. In previous lessons, we looked at USCI_Ax which implements UART and SPI. The USCI_Bx module implements I2C and SPI.
Let us review the USCI module registers, specifically those fields which apply to I2C. Note that the same module is used to configure the MSP430 as a slave device, which we will cover in another lesson. Those fields have been marked as such.
The first configurations register, UCBxCTL0, USCI_Bx Control Register 0, contains the configuration for the protocol.

TI MSP430x2xx Family Reference Manual (SLAU144J)
| Bit | Field | Description |
|---|---|---|
| 7 | UCA10 | Address mode (slave only) 0b0: 7 bit address mode 0b1: 10 bit address mode |
| 6 | UCSLA10 | Slave address mode 0b0: 7 bit address mode 0b1: 10 bit address mode |
| 5 | UUCMM | Multi-master environment (slave only) 0b0: Single master environment 0b1: Multi-master environment |
| 3 | UCMST | Master/slave mode 0b0: Slave mode 0b1: Master mode |
| 2-1 | UCMODEx | USCI mode 0b00: 3-pin SPI (not valid for I2C) 0b01: 4-pin SPI STE=1 (not valid for I2C) 0b10: 4-pin SPI STE=0 (not valid for I2C) 0b11: I2C |
| 0 | UCSYNC | Synchronous/Asynchronous mode 0b0: Asynchronous (Invalid for I2C) 0b1: Synchronous (SPI/I2C) |

TI MSP430x2xx Family Reference Manual (SLAU144J)
| Bit | Field | Description |
|---|---|---|
| 7-6 | UCSSELx | USCI clock source select 0b00: UCLK external clock source 0b01: ACLK 0b10: SMCLK 0b11: SMCLK |
| 4 | UCTR | Transmitter/receiver mode – sets R/W 0b0: Receiver (read from the slave) 0b1: Transmitter (write to the slave) |
| 3 | UCTXNACK | Transmit a NACK 0b0: Send ACK 0b1: Send NACK |
| 2 | UCTXSTP | Generate a STOP condition 0b0: No STOP generated 0b1: STOP generated (automatically cleared upon completion) |
| 1 | UCTXSTT | Generate a START condition 0b0: No START generated 0b1: START generated (automatically cleared upon completion) |
| 0 | UCSWRST | USCI module software reset 0b0: USCI operational – not in reset 0b1: Reset USCI module |

TI MSP430x2xx Family Reference Manual (SLAU144J)
| Bit | Field | Description |
|---|---|---|
| 6 | UCSCLLOW | SCL line held low 0b0: SCL not held low 0b1: SCL held low |
| 5 | UCGC | General call address received 0b0: No general call address received 0b1: A general call address was received |
| 4 | UCBBUSY | Busy busy 0b0: Bus free – no transaction in progress 0b1: Bus busy – transaction in progress |
| 3 | UCNACKIFG | Not acknowledged interrupt flag 0b0: No interrupt pending 0b1: Interrupt pending |
| 2 | UCSTPIFG | STOP condition interrupt flag 0b0: No interrupt pending 0b1: Interrupt pending |
| 1 | UCSTTIFG | START condition interrupt flag 0b0: No interrupt pending 0b1: Interrupt pending |
| 0 | UCALIFG | Arbitration lost interrupt flag 0b0: No interrupt pending 0b1: Interrupt pending |

TI MSP430x2xx Family Reference Manual (SLAU144J)
| Bit | Field | Description |
|---|---|---|
| 3 | UCB0TXIFG | USCI_B0 transmit complete interrupt flag 0b0: No interrupt pending 0b1: Interrupt pending |
| 2 | UCB0RXIFG | USCI_B0 receive interrupt flag 0b0: No interrupt pending 0b1: Interrupt pending |
Next we have the two baud rate control registers UCBxBR0 and UCBxBR1, the low and high bytes which form the prescaler value. Well see how to configure these later in the lesson.
The UCBxI2CSA is the slave address register. This is where the driver writes the address of the slave and the hardware will automatically shift the address left by one bit to accommodate the R/W bit.
To receive and transmit data there are two 8-bit registers, UCBxRXBUF and UCBxTXBUF respectively. To send data (not including the device address byte), data is written to UCBxTXBUF. This also clears UCAxTXIFG (transmit complete interrupt flag). Once the transmission is complete, UCAxTXIFG will be set. Similarly, when data is received on line, it is stored in UCAxRXBUF and UCAxRXIFG (receive interrupt flag) is set. The data is held in this register until it is read by software. When UCAxRXBUF is read by software, UCAxRXIFG is cleared.
Registers IE2 and UCBxI2COA, are only required for interrupt based drivers and slave configuration respectively and therefore will not be covered in this lesson.
Implementing the driver
Now that we have a high level understanding of the USCI module register set in I2C mode, let’s get coding. The I2C driver will be quite simple – it will not use interrupts at this point, only polling – not the best implementation for several reasons covered previously (blocking, power consumption, etc…) but it will suffice for learning the basics. First we will start off with a simple initialization routine which will live in a new source file src/i2c.c. This function will be responsible for configuring the features which will not change during runtime.
int i2c_init(void)
{
/* Ensure USCI_B0 is in reset before configuring */
UCB0CTL1 = UCSWRST;
/* Set USCI_B0 to master mode I2C mode */
UCB0CTL0 = UCMST | UCMODE_3 | UCSYNC;
/**
* Configure the baud rate registers for 100kHz when sourcing from SMCLK
* where SMCLK = 1MHz
*/
UCB0BR0 = 10;
UCB0BR1 = 0;
/* Take USCI_B0 out of reset and source clock from SMCLK */
UCB0CTL1 = UCSSEL_2;
return 0;
}
The module is setup for master mode I2C by setting UCMODEx to 0b11
(I2C), UCMST to 0b1 (master) and UCSYNC to 0b1 (I2C is a synchronous
protocol) in the UCB0CTL0 register. Everything else can remain at the
default values as they are sufficient for our use case.Next the clock source is selected to be SMCLK by setting UCSSELx to 0b10 in UCB0CTL1. Based on our clock module configuration, this means the USCI module will be running at 1MHz. With the source clock frequency configured, we can now setup the baud rate registers. The baud rate registers act a divider. We want the I2C bus to run at the standard 100kHz, so the divider value must be 1MHz / 100kHz = 1000000 / 100000 = 10. Therefore, we only need to set the low byte UCB0BR0 to 10. Now that everything is set up, finally we can take the USCI module out of reset by clearing UCSWRST in UCB0CTL1.
The initialization function should be called from board_init along with the rest of the hardware initialization. The pins need to be configured as well. From the pinout in the device datasheet for the MSP430G2553, SCL and SCK are located on P1.6 is and P1.7 respectively.
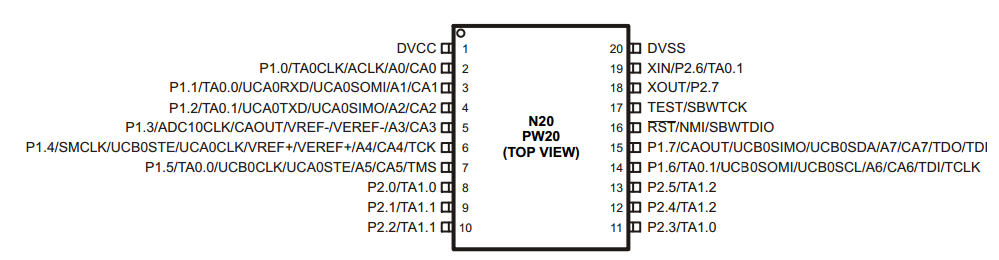
TI MSP430G2x53 Datasheet (SLAS735J )
These two pins must be configured to work with the USCI block by
setting the applicable bits in P1SEL and P1SEL2 high. Recall the reason
we put these pin configurations here and not in the driver is to help
isolate the driver implementation from the board specific configuration.
Now board_init should look like this:[...]
/* Configure P1.1 and P1.2 for UART (USCI_A0) */
P1SEL |= 0x6;
P1SEL2 |= 0x6;
/* Configure P1.6 and P1.7 for I2C */
P1SEL |= BIT6 + BIT7;
P1SEL2 |= BIT6 + BIT7;
/* Global interrupt enable */
__enable_interrupt();
watchdog_enable();
/* Initialize UART to 9600 baud */
config.baud = 9600;
if (uart_init(&config) != 0) {
while (1);
}
if (i2c_init() != 0) {
while (1);
}
In a new header file include/i2c.h, we will define the I2C device
structure which for now only consists of the device address of the slave
device. In the future it may include other device specific parameters.struct i2c_device
{
uint8_t address;
};
Next we will write the transfer function. The transfer function
should require the device structure as a parameter so that it can
support multiple slave devices on the same bus. It should also be able
to handle all three transaction formats so it will require two buffers,
one to transmit and another to receive. It will also need to know the
length of these buffers. Instead of making this function take a huge
argument list, we will define another structure – i2c_data – in i2c.h
which will encapsulate both transmit and receive buffers and their
respective sizes.struct i2c_data
{
const void *tx_buf;
size_t tx_len;
void *rx_buf;
size_t rx_len;
};
Now the transfer function only takes two parameters, the i2c_device structure and i2c_data structure.int i2c_transfer(const struct i2c_device *dev, struct i2c_data *data)
{
int err = 0;
/* Set the slave device address */
UCB0I2CSA = dev->address;
/* Transmit data is there is any */
if (data->tx_len > 0) {
err = _transmit(dev, (const uint8_t *) data->tx_buf, data->tx_len);
}
/* Receive data is there is any */
if ((err == 0) && (data->rx_len > 0)) {
err = _receive(dev, (uint8_t *) data->rx_buf, data->rx_len);
} else {
/* No bytes to receive send the stop condition */
UCB0CTL1 |= UCTXSTP;
}
return err;
}
The function begins by setting the slave device address in the
UCB0I2CSA register. The following transactions will therefore be
directed at this device. To support all three I2C transaction formats we
need to first consider the transmit buffer. If there are bytes to
transmit, these are sent first, so check the size of the transmit buffer
is greater than zero – if so transmit the buffer. The actual writing of
the buffer to the hardware is broken out into a separate function for
the sake of keeping functions small and readable. Once the transmit is
complete, and if there are no errors, then it’s time to see if the
master needs to read any data from the slave. If so, then call the
receive function. If there are no bytes to receive, then the transaction
is complete and the master should issue the STOP condition by setting
UCTXSTP in the UCB0CTL1 register.Let’s quickly verify how this covers all three I2C transaction formats.
Master transmitter slave receiver: The transmit buffer will have data and therefore the length should be non-zero. Data will be transmitted to the slave. The receive buffer will have a length of zero so master does not receive any data from the slave. Therefore immediately after the transmit is complete the STOP condition will be set.
Master receiver slave transmitter: The transmit buffer will have a length of zero. Therefore the transmit section of the function will be skipped. The length of the receive buffer should be greater than zero and therefore the master will read that number of bytes from the slave and then the STOP condition will be set.
Combined format: In this case both the transmit and receive buffers are greater than zero. Start by transmitting the required number of bytes. If no errors have occurred, a repeated START condition will be issued and the master will receive data from the slave. Once that is complete, the STOP condition will be set.
Based on this quick analysis, we can see that this function will provide the flexibility required to support all three I2C formats and therefore should support any I2C slave device.
Now let’s take a look at how the driver transmits data from the master to the slave.
static int _transmit(const struct i2c_device *dev, const uint8_t *buf, size_t nbytes)
{
int err = 0;
IGNORE(dev);
/* Send the start condition */
UCB0CTL1 |= UCTR | UCTXSTT;
/* Wait for the start condition to be sent and ready to transmit interrupt */
while ((UCB0CTL1 & UCTXSTT) && ((IFG2 & UCB0TXIFG) == 0));
/* Check for ACK */
err = _check_ack(dev);
/* If no error and bytes left to send, transmit the data */
while ((err == 0) && (nbytes > 0)) {
UCB0TXBUF = *buf;
while ((IFG2 & UCB0TXIFG) == 0) {
err = _check_ack(dev);
if (err < 0) {
break;
}
}
buf++;
nbytes--;
}
return err;
}
The transmission begins by setting the START condition. On the
MSP430, this is done by setting UCTXSTT in the UCB0CTL1 register. Since
the master is transmitting data to the slave, the UCTR bit needs to be
set as well, which puts the USCI module in transmit mode. The hardware
will now set the START condition and send the first byte with with I2C
device address and R/W bit after which the UCTXSTT bit will be cleared
and the transmit interrupt flag UCB0TXIFG in IFG2 set. Before
transmitting the data however, we must check to make sure a slave
acknowledged the initial byte. This is a common check, so it has been
broken out into its own function which we’ll take a look at in more
detail shortly. If the master received an ACK from the slave device,
then it is safe to load the first data byte into the transmit buffer.
Again we wait until the transmit interrupt flag is set and check for the
ACK. The master must receive an ACK for every data byte before
transmitting the next one. A slave device may NACK additional data if it
busy so receiving a NACK would be an indicator to the master to stop
transmitting. This cycle is repeated until all the data has been
transmitted (or the transaction is forced to stop by a NACK). Notice at
the end of the transmit function that we do not send a STOP condition
because there may be data to receive, in which case a there should be a
repeated START condition and not a STOP condition.Next, let’s take a look at how the master receives data from the slave device.
static int _receive(const struct i2c_device *dev, uint8_t *buf, size_t nbytes)
{
int err = 0;
IGNORE(dev);
/* Send the start and wait */
UCB0CTL1 &= ~UCTR;
UCB0CTL1 |= UCTXSTT;
/* Wait for the start condition to be sent */
while (UCB0CTL1 & UCTXSTT);
/*
* If there is only one byte to receive, then set the stop
* bit as soon as start condition has been sent
*/
if (nbytes == 1) {
UCB0CTL1 |= UCTXSTP;
}
/* Check for ACK */
err = _check_ack(dev);
/* If no error and bytes left to receive, receive the data */
while ((err == 0) && (nbytes > 0)) {
/* Wait for the data */
while ((IFG2 & UCB0RXIFG) == 0);
*buf = UCB0RXBUF;
buf++;
nbytes--;
/*
* If there is only one byte left to receive
* send the stop condition
*/
if (nbytes == 1) {
UCB0CTL1 |= UCTXSTP;
}
}
return err;
}
Receiving data requires the master to send the START condition and
slave device address byte but this time with the R/W bit cleared by
clearing UCTR, putting the USCI module in receive mode. UCTXSTT is set
to start the transaction and once the first byte is sent, UCTXSTT will
be cleared by the hardware. Now the slave will begin sending data, but
in the case of master receive mode the ACK is driven by the master
rather than the slave. The master must NACK the last data byte it wants
to receive. Otherwise, the slave does not know to stop sending data and a
bus error or device error may result. If the receive buffer is only one
byte, as soon as the first byte has finished transmitting, the stop
bit, UCTXSTP in UCB0CTL1, must be set. In master receive mode setting
this bit sends the NACK and then issues the STOP condition. The slave
will still ACK the I2C device address byte, so this must be verified by
the master. Assuming the ACK was received, the slave device will begin
sending over data, each byte triggering the receive interrupt flag. Once
the flag is set the data received is in the UCB0RXBUF register and can
be read out. This is repeated for all data bytes until there is only one
left to receive. The master must NACK the last data byte and then issue
a STOP condition, so before receiving it we must set UCTXSTP.Finally, let’s take a look at how to handle the N/ACK from the slave device.
static int _check_ack(const struct i2c_device *dev)
{
int err = 0;
IGNORE(dev);
/* Check for ACK */
if (UCB0STAT & UCNACKIFG) {
/* Stop the I2C transmission */
UCB0CTL1 |= UCTXSTP;
/* Clear the interrupt flag */
UCB0STAT &= ~UCNACKIFG;
/* Set the error code */
err = -1;
}
return err;
}
There are a few conditions in which the master might receive a NACK
as we have seen. It could be the address does not match, or the slave
can no longer receive any data. To check for a NACK, the NACK interrupt
flag field, UCNACKIFG in the status register UCB0STAT, should be read.
When the master receives a NACK, it should abort the transaction.
Therefore, it must send a STOP condition and should clear the interrupt
flag.Using the driver to write and read data
Now that the driver is written, we can use it to store data to the EEPROM. Lets connect the breadboard to the MSP430 LaunchPad. Vcc and ground are straightforward – they are simply connected to the Vcc and ground pins on the LaunchPad. Pins P1.6 and P1.7 were configured for SCL and SDA respectively in board.c, so those pins can be connected to the EEPROM pins 6 and 5 on the breadboard.
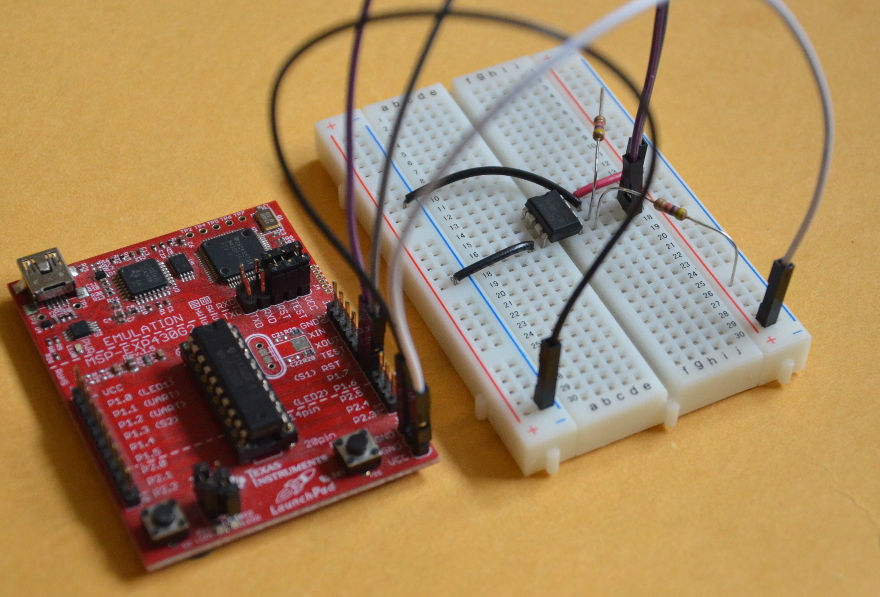
To test out our driver, we will create two new menu options to read and write a single byte to the EEPROM. Currently they only support reading and writing one byte of data but they could be extended to ask the user for a length, or you can modify the code to change the size of the buffers.
static int eeprom_read(void)
{
int err;
struct i2c_device dev;
struct i2c_data data;
uint8_t rx_data[1];
uint8_t address;
dev.address = 0x50;
address = (uint8_t) menu_read_uint("Enter the address to read: ");
data.tx_buf = &address;
data.tx_len = sizeof(address);
data.rx_len = ARRAY_SIZE(rx_data);
data.rx_buf = (uint8_t *) rx_data;
err = i2c_transfer(&dev, &data);
if (err == 0) {
uart_puts("\nData: ");
uart_puts(_int_to_ascii(rx_data[0]));
uart_putchar('\n');
}
return err;
}
static int eeprom_write(void)
{
int err;
struct i2c_device dev;
struct i2c_data data;
uint8_t write_cmd[2];
dev.address = 0x50;
write_cmd[0] = menu_read_uint("Enter the address to write: ");
write_cmd[1] = menu_read_uint("Enter the data to write: ");
data.tx_buf = write_cmd;
data.tx_len = ARRAY_SIZE(write_cmd);
data.rx_len = 0;
err = i2c_transfer(&dev, &data);
return err;
}
In both cases the user is asked to enter the address. The read
function points the transmit buffer to the address and sets the length
to 1 byte, which is standard for this device (other EEPROMs or I2C
devices that have a bigger address space may require more than 1 byte
for the address). The receive buffer points to the rx_data array, which
has been defined with one element. If you want to increase the number of
bytes read, the size of this array can be modified. The i2c_transfer
function is called and and the received data is printed out to the
serial port. For example, try to read the data at address 0x7 – here is a
screenshot of the I2C transaction from an oscilloscope.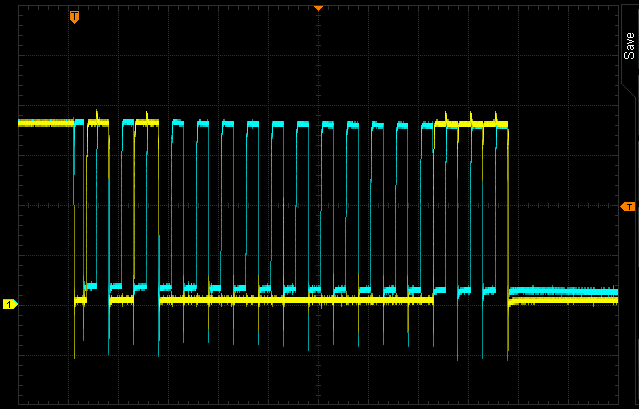
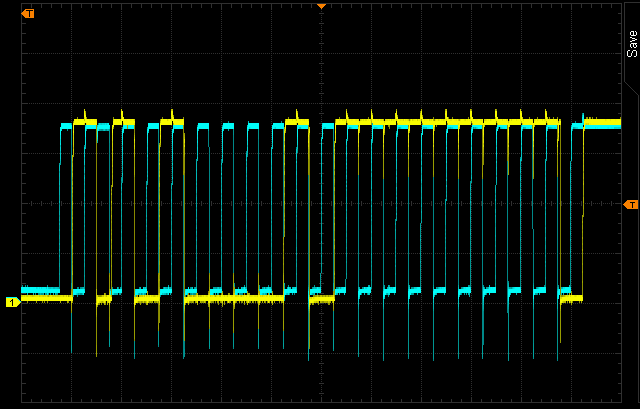
The blue trace is SCL and the yellow trace SDA. We can see the first byte being transmitted is 0xA1 ((device address << 1) | write = (0x50 << 1) | 0x1 = 0xA1). On the 9th clock cycle, the SDA line is low, indicating that the EEPROM acknowledged the first byte. Then the address to read from is transmitted. Over the next 8 clock cycles, the SDA line toggles to 0b00000111 = 0x7. Again on the 9th clock cycle the EEPROM acknowledges. Since a read is a combined format transaction, both SDA and SCL are released high and the repeated START condition is issued. However, at the end of the first image, you can see both lines are held low for quite some time. This is called clock stretching and it is implemented by the hardware to delay the next byte in the transaction. In this case, the EEPROM is saying ‘wait for me to retrieve the data!’. When it is done, the master can continue clocking in the byte. Now the first byte is 0xA0 ((device address) << 1 | read = (0x50 << 1) | 0 = 0xA0). The EEPROM acknowledges once more and the next 8 clock cycles it transmits the data byte back to the master. In this case the data at address 0x7 was 0xFF – the ‘erased’ value of an EEPROM. The transaction ends with the STOP condition and both lines return to idle.
The write function is similar except that the user is also prompted for the value to write. The transmit buffer is pointed to the write_cmd array which has a length of 2 bytes, one for the address and the other for the data. Again, this could be increased in size to write more data. The receive buffer isn’t set but the length must be set to 0 to indicate to the driver there are no bytes to receive. If I now write the value 55 (0x37) to address 0x7, the transaction will look like this:
The first byte being transmitted is 0xA1 ((device address << 1) | write = (0x50 << 1) | 0x1 = 0xA1). On the 9th clock cycle, the SDA line is low, indicating that the EEPROM acknowledged the first byte. Then the address to write is transmitted. Over the next 8 clock cycles, the SDA line toggles to 0b00000111 = 0x7. Again on the 9th clock cycle the EEPROM acknowledges and then the master starts to transmit the data and we can see the SDA line toggle to 0b00110111 = 55. The transaction once again ends with the STOP condition and both lines return to idle.
This test code is not really how an EEPROM would be accessed in practice but at least we can test our interface, driver and hardware setup. In the next tutorial we will look more at reading and writing from the EEPROM and demonstrate some real-life use cases.

{kind=link}
{kind=link}
No comments:
Post a Comment